
| Quadlator II--其他配置和多线程基础 写于: 星期六 29 四月 @ 12:54:21 |
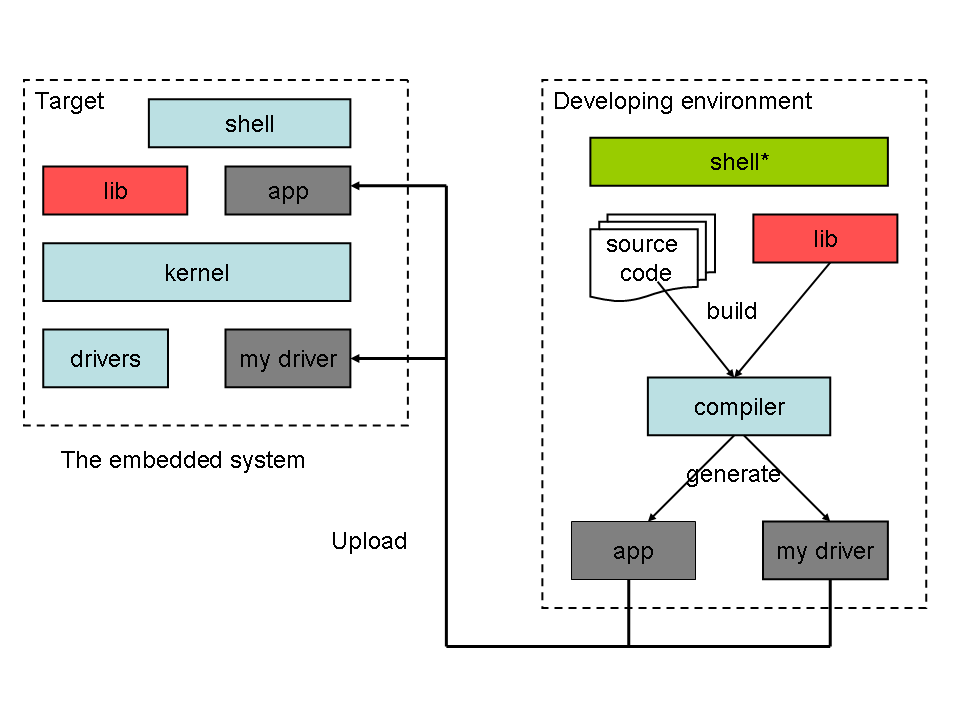
Quadlator II--其他配置和多线程基础 作者:phpbb2/profile.php?mode=viewprofile&u=234"target="_blank">baredog 二,其他配置和多线程基础 现在回过头来看,2003年的时候,为了赶在9月20号的demo前完成制作,拼命赶进度,很多东西不求甚解。正因如此,也走了不少弯路,比如这一章就是。由于当时没有明确开发环境和目标环境的概念,没有明确交叉编译和目标下载、在线调试的概念。浪费了很多时间和精力去配置目标环境。其实有很多是没有必要的。 2.1、配置bash配置Bash是为了开发者方便,而开发者不必在目标环境(嵌入式系统)上开发,因此不必过分追求目标环境上的界面如何。这些工作放在配置开发PC上更加适合。那么目标环境和开发环境的关系是怎么样的呢?还是一图胜千言那句话,下面的示意图描述了两者间的关系:
图中同样颜色的红色和灰色部分,表明了目标系统和开发系统中必须相同的内容。最关键的就是他们拥有相同的目标库,而其他环境都可以不同,这样在开发环境下写出的代码,通过交叉编译可以生成在目标环境下能够运行的二进制代码。这些代码通过各种手段(无线LAN,蓝牙,CF卡等等)上载到目标环境下,就可以直接被目标环境的Kernel加载。这样的好处是,目标环境根本不需要开发相关的内容(头文件,静态连接库等),只需要最基本的运行时库和kernel,以及最小化的shell就足够了。系统可以做的非常小巧紧凑。目标上的shell仅仅用于应急配置和诊断,以及用于接受编译好的二进制文件所需的一些辅助功能。 因此所谓的配置bash,决不应该是以前写的配置目标系统的bash,而是应该配置开发系统的bash,目标系统仅仅做一些极小的改动就足够了。 Linux下的各种shell中,近年来bash非常流行,已经成为很多Linux发布版本的默认shell。如果稍加配置,就可以支持彩色终端,显示界面比较友好,例如:目录是蓝色的,符号链接或者硬链接是浅兰色,可执行文件是绿色。如果使用远程终端,那么终端软件(ssh或者telnet client)也需要支持ANSI彩色,微软的telnet 从2000后支持,但是不支持ssh协议,国内比较流行的sterm也非常易用。如果用Netterm的话,需要ssh插件。类似的软件还有 Security CRT等等(06年我还看到有人用PuTTY,也是免费的)。如果开发环境的PC上启动了XWindow的XDM,还可以选择用xwin32,Extra X和exceed等远程桌面环境,一个免费的选择是CygWin,同时带有ssh和X。 以下这些内容在高版本的Redhat和Fedora下,全部作为缺省实现了,读者可以跳过这些内容。 在linux下,一个用户登录后bash是这样工作的:
目标环境仅仅是一个嵌入式系统,为了最小化系统,通常只留有root一个用户,可以自由操作控制整个系统。因此也没有必要预留通常 linux提供的adduser, useradd等命令工具。但是这客观上要求,在目标系统上直接操作时,要格外小心,避免由于简单失误而造成的损失(例如在/下运行了rm -rf *而删除了全部系统)。在开发环境上,可以自由配置bash,下面给出2个开发环境下bash的配置文件的例子: .bash_profile中加入以下的内容,可以自动运行用户的个人配置 # Get the aliases and functions .bashrc中加入一下的内容,可以导入系统公共的bash sheel配置给当前用户: if [ -f /etc/bashrc ]; then 这样用户登录后,就会运行公共的bash配置文件/etc/bashrc,此后可以通过编辑/etc/bashrc文件,进行进一步的配置 在/etc/bashrc中加入这样的行: alias ls='ls -F --color=auto' # ls的结果以彩色显示
以下这个小改动对于目标系统也有一定的必要,可以减少发生无操作这类错误的机会。缺省下titechwire的提示符是一个#号,用户以root身份操作时, 并不能直观的了解当前所在的工作目录。可以通过加入一下内容,来使得提示符显示当前的工作目录信息: PS1="[u@h W]$ " 这样,用户登录后会显示: [root@quadlator /root #]
在开发PC上,可以根据个人的习惯,进一步配置开发环境,包括编辑器或者IDE等等。再一些老旧的Linux系统上,如果希望编辑器 VIM显示语法颜色,可以通过在用户目录下增加一个配置文件.exrc,并加入以下内容 syntax on #打开语法彩色显示功能 2.2 多线程编程,pthread RT-Linux的一个重要概念是real time task,主要靠线程来实现。每一个task拥有良好的实时性能,这些task同Linux内核一起,被RT-Linux的内核调度,分配时间片等 CPU资源。Linux本身的一些应用中,如果良好的使用线程,也可以提高效率。有关线程和进程的区别,很多著述中有所介绍。包括从虚拟内存空间等资源上的区别和调度的一些区别。这里有一点可以额外说一句,就是内核模块和用户程序中都可以使用线程。使用方法也没有太大的区别。Linux系统提供了pthread库来提供对多线程的支持。 Quadlator II中使用了多线程来组织控制程序,大体上的结构如下图: 在Quadlator II中,除了嵌入式系统titechwire之外,尚有一台额外的计算机介入系统。机器人的姿态算法等高层计算(实时性要求不高的内容)和基本的用户控制 UI被分离出来移动到这台计算机上。嵌入式系统在这样的分工中,仅仅专门负责最底层的电机控制和各关节物理量的测量。 采用这样的结构后,机器人和高层控制计算机机就可以采取Client/Server体系,机器人为server,高层控制计算机机上为 client。事隔3年后,我再回过头来看这样的体系结构,觉得当时的考虑为了赶时间带有了很大的局限性。现在可以在此深入探讨一下各种架构的优缺点。 首先03年采用上图中的架构,主要考虑如下:
上述方案的缺点,现在总结下来大概如下:
现在再看看另外一种架构:机器人独立运行,同时以接口的方式实现功能扩展:
(点击放大) 这种形式的架构下,机器人自身是具有高度独立性的。内核模块利用很好的实时性能,提供PID闭环控制:接受命令-->驱动DA-->功率放大后驱动电机-->测量反馈量-->送入DIO。同时有一组事先储存好的预定动作,如起立,向前走,拐弯等等。在用户空间设有一个对实时性能要求不高的基本运动控制模块。它根据更高层的指令,读取这些预定动作,然后将预定动作分解为命令序列发送给内核空间的PID控制模块。 这个架构提供了3个扩展接口,2个软件接口,1个硬件接口。都用绿色标记了出来。其中一个软件接口,允许增加,更新和删除已经存储的预定动作,比如增加一个坐下的动作等等。另外一个软件接口可以提供通过计算机指挥机器人动作的可能。计算机可以发出简单的命令,如:起立,向前走,向右转,再向前走等等;也可以发出连续的运动指令,用来测试新编写的预定动作。剩下一个硬件扩展接口,可以增设遥控接收装置,这样普通的消费者可以通过遥控器简单的控制机器人运动。 这种架构的优点是:
这种架构的缺点是:
现在把话题收回来,Quadlator 2实际采用的第一个架构下,机器人大致工作如下:机器人上的程序运行后,就启动server,在网络上监听,等待控制程序连接进来。早期的linux下网络编程,收到连接请求后,往往使用fork的方法,开一个新进程,Quadlator 2没有使用fork,而采用了多线程的方法,单独开一个线程,负责接收网络上控制计算机的计算结果。 如前面所述,Linux下可以使用pthread库来实现多线程。 2.2.1 简单例子,和link出错问题这里用一个简单的例子来说明pthread的基本用法。在这个例子中,程序启动后,主程序就开出两个独立线程,一个每隔1秒数数,一个每隔两秒,都是数到10就停止: // thread test program |
共1条
1/1 1 跳转至页
Quadlator II--其他配置和多线程基础
只看楼主 1楼

关键词: Quadlator 其他 配置 线程 基础 开发
共1条
1/1 1 跳转至页
回复
| 有奖活动 | |
|---|---|
| 硬核工程师专属补给计划——填盲盒 | |
| “我踩过的那些坑”主题活动——第002期 | |
| 【EEPW电子工程师创研计划】技术变现通道已开启~ | |
| 发原创文章 【每月瓜分千元赏金 凭实力攒钱买好礼~】 | |
| 【EEPW在线】E起听工程师的声音! | |
| 高校联络员开始招募啦!有惊喜!! | |
| 【工程师专属福利】每天30秒,积分轻松拿!EEPW宠粉打卡计划启动! | |
| 送您一块开发板,2025年“我要开发板活动”又开始了! | |
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| Chaos-nano操作系统在手持式VOC检测设备上的应用被打赏¥37元 | |
| 【分享开发笔记,赚取电动螺丝刀】关于在导入第三方库lib时,wchart类型冲突的原因及解决方案被打赏¥30元 | |
| 在FireBeetle2ESP32-C5上实现温湿度检测和显示被打赏¥20元 | |
| 在FireBeetle2ESP32-C5上实现光照强度检测及显示被打赏¥21元 | |
| 以FireBeetle2ESP32-C5实现数据识读播报被打赏¥19元 | |
| 【STM32F103ZET6】14:实测STM32F1的串口输出任务的挂起与恢复功能被打赏¥27元 | |
| Chaos-nano在压力容器监控系统中的项目应用被打赏¥23元 | |
| 基于FireBeetle2ESP32-C5的WS2812B彩色灯带控制被打赏¥21元 | |
| SWM221CBT7显示开发板驱动TFT显示屏被打赏¥19元 | |
| SWM221CBT7显示开发板驱动OLED屏显示被打赏¥19元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

