
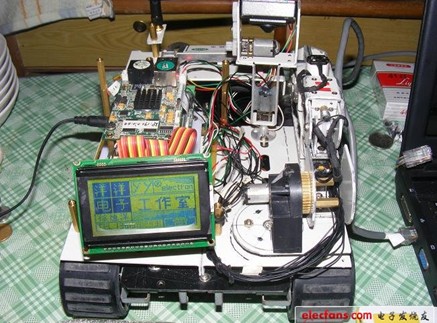
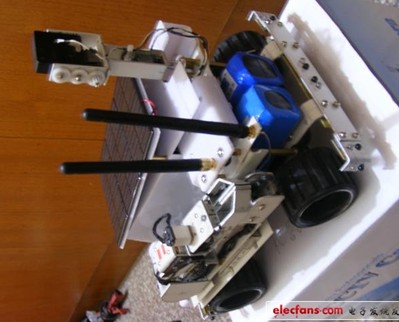
这个四轮驱动机器人的底盘完全由手工打造,无论是轮子还是底盘,大家可以看看图哦
将最近做的一个基于WIFI,3G控制的四轮驱动机器人拿出来与大家分享一下!
轮子是由一个铝合金外罩,内部嵌入钢轮,再连接减速电机,轮子的外面很清晰的可以看是有橡胶用502粘起来,效果不错哦。

下面介绍一下机器人的功能:
这是一个无线远程端控制型四轮驱动机器人,带有水平垂直控制云台,云台上搭载一个豆干摄像头,3.6MM镜头,可以看到较广的视野。3度机械手,可以实现较难度的控制,
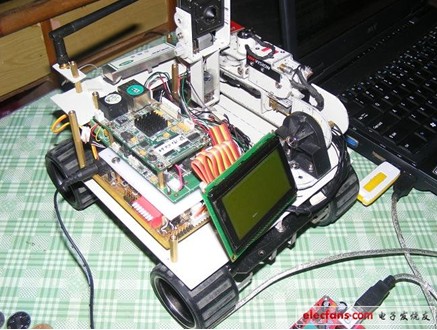
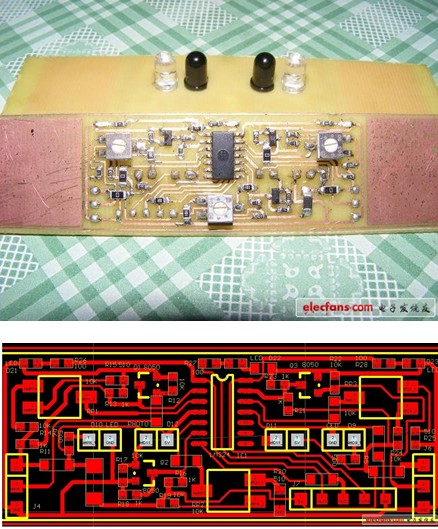
搭载一个12864控制显示液晶模块。

外加一个无线网卡实现无线控制。实现寻迹、前后四方向自动壁障,太阳能充电,16.5V电池管理和编程自动化等功能。

虽然自动寻迹,自动壁障,太阳能充电,还没做,不过都是简单的几个功能。
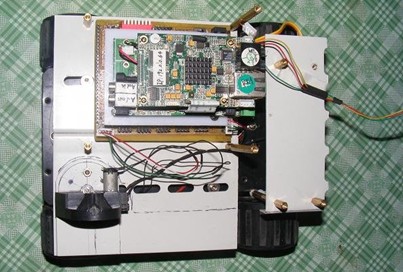
下面详细介绍各部分
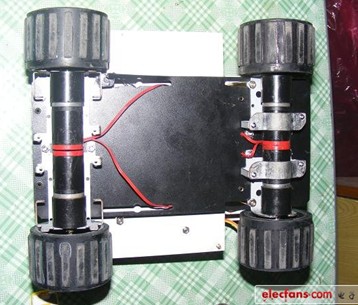
我喜欢而且最费时间的是底盘部分,毕竟基础一定要打好,不然会翻车哦,底盘很重,完全有金属打造,轮子外圈采用中空铝合金,由于里面是中空的,所以得装中心轴,而中心轴采用经过打磨的纯钢圈,再里面是铜轴与减速电机连接,所以较复杂也费时间。底盘面也采用钢板构架。与电机固定的是铁支架,所以整套底盘完完全全由钢铁制作。减速电机的速度为30圈每分钟。速度不是很快,但很精确。


机械手的结构足足花了我半个月的时间,其主要材料采用铝合金,因为铝合金的材质很轻,且质量较硬。所以做机械手是最合适的,上面的每一个结构和关节都由手工打磨而成。花费了不少时间和精力,毕竟要在图纸上设计机械手的结构和相关参数。而机械手的动力也采用减速电机来做,而不用舵机。舵机打算在改进后设计。这只机械手有3个垂直水平关节结构和一个夹手。里面都设计了一个方向接触式传感器,可控制机械手的伸缩角度。摄像头云台也采用减速电机设计,外铝合金构架。

上面搭载的摄像头为480线的模拟豆干。再经过齿轮的减速可以将摄像头转动速度降低。提高图像稳定性。无线网卡为了防干扰再外面加了个铁罩。外面引了一个外置天线,一般无线传输距离室内100米左右。

控制显示采用的是12864液晶模块,这种模块使用很是方便,也效果也好,亮度,灰度可调,可显示16*16的字体,也可以显示黑白图片。不带字库。















 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

