
作者:广西师范大学 谢伟 唐宗欢 陈锡文
指导教师:何富运 牛苗苗
作品简介
1、开发背景:
移动机器人学是机器人学的一个重要分支,研究的内容是如何在复杂环境下对机器人实时控制的问题。展到现在,在生产和生活中随处可见其身影,并且扮演了重要角色,例如:移动机器人在运载、反恐、排雷、航天航空等领域已经成功应用。如果对其按照结构分类,主要有:轮式、履带式、腿式、蛇行式、跳跃式和复合式,它们根据各自的特点适用于不同的场合。其中轮式机器人是使用最广,数目最多的一种,比如:自行车、三轮车、汽车、火车等。具有自重轻、承载大、机构简单、驱动和控制相对方便、行走速度快等特点。轮式机器人按照轮子的数量,又可以分为:单轮、双轮、三轮、四轮、多轮。像三轮、四轮及四轮以上的车辆,由于其驱动装置或轨道平台的非完整约束不需要欲仙操控就能够防止侧向运动,但这些车辆的运动受到极大限制,尤其在活动空间很小的环境中更是如此。
对于两个轮子的机器人,人们所熟知的自行车、摩托车等。特点是两轮子处于同一个平面,静态稳定性差,在运动中控制左右的应力保持平衡。还有人们千百年来所使用的两轮手推车,它的两个轮子分别在共轴的两个平行的平面上,但需要第三个支点才能稳定。近年来有一种双轮平衡车突破了传统意义上的车的概念,它的特点是:两个轮子处于共轴的两个平行平面上,差动式运动,零半径转向,依照倒立摆的原理达到动态平衡。
2、结构说明:
本作品采用了大赛指定的嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心),扩展了电源电路、编码器电路、电机驱动电路等设计开发了双轮自平衡机器人。同时设计了以TFT触摸屏、无线通信模块等组成的控制主机,实现对机器人各项参数的实时采集以及对机器人的运动状态的简单控制。
3、 功能与使用说明:
双轮自平衡机器人以常规小车的动力轮为支撑点直立行走,通过自带的电磁检测电路,完成对道路上铺设的电磁线的识别并寻迹行走。同时机器人在运行过程中的各种指标参数通过2.4G无线通信模块实时的传送到上位机控制端,并能接收来自控制端的控制信号完成相应的动作。
主控制机由单片机、TFT液晶触摸屏、2.4G无线通信模块组成,移植了uC GUI 图形用户界面,使得全部操作都以触摸的方式完成。
平台选型说明
嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心)
设计说明
1、作品设计整体框图如下:
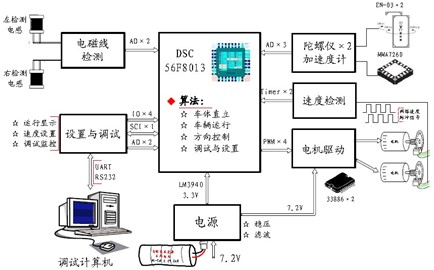
(1)单片机最小系统:包括MK10处理器,程序下载调试接口等;
(2)电磁线检测:包括两路相同的电磁感应信号放大与检波电路;
(3)陀螺仪与加速度计:包括三个姿态传感器信号放大滤波电路;
(4)速度检测:检测电机光电码盘脉冲频率,实际上只包括了两个光电码盘的传感器;
(5)电机驱动:驱动两个电极运行功率电路;
(6)电源:电源电压转转换,稳压,滤波电路;
(7)设置与调试:显示系统运行状态、速度设定、程序下载与监控。
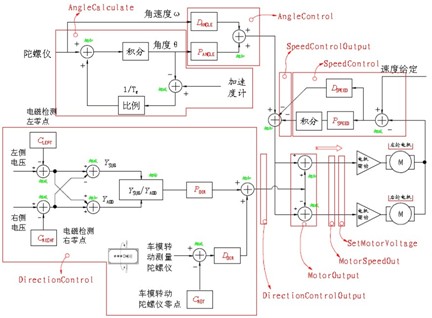
2、设计原理:
作品算法框图如图所示:
作品特色
1、先进性:采用诸如卡尔曼滤波、PID控制等现代自动控制算法结合嵌入式技术、无线通信技术等综合设计出了一款智能机器人。
2、实用性:双轮自平衡机器人以灵活、方便、节能等特点被广泛应用在各种实时性要求较高的场合,解决了人工难以完成的检测、排险等问题。
3、创新性:将现代自动控制算法嵌入到智能机器人中。
系统演示视频:http://v.eepw.com.cn/video/play/id/2348
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

