
作者:滨州学院 孟磊 谢同森 余曼琦
指导教师:赵春波
作品简介
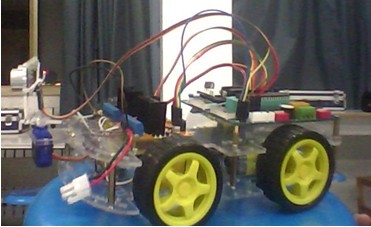
设计采用STC15F2K61S2作为智能小车的检测和控制核心。加以直流电机、 超声波传感器、动态扫描显示电路和电源电路以及其他电路构成。系统由STC15F2K61S2通过I/O口控制小车的前进、倒退、以及转向。避障采用超声波传感器检测物体,通过调整传感器与物体之间的距离以及传感器的安装位置,能够实现精确的检测。基于这些完备的可靠的硬件设计,能够实现小车的精确控制。小车系统分为以下几个基本模块:显示模块、电机驱动模块、检测物体的避障模块,调速模块。对各模块的实现,分别有以下不同的设计方案:
1.电机的驱动模块
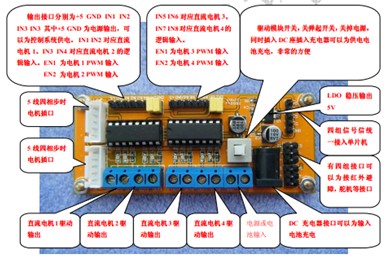
本 L293D驱动模块驱动模块,采用 ST C公司原装全新的 L298N 芯片,采用 SMT工艺稳定性高工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。可以直接驱4路3--16V直流电机,并提供了5V输出接口 (输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数)支持 3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机5线4 相步进电机,是智能小车必备利器利器。
2.产品参数:
1.驱动芯片L293D双H桥直流电机驱动芯片桥直流电机驱动芯片 (两片)
2.驱动部分端子供电范围Vs:+5V~+16V; 如需要板内取电则,供电范围供电范围Vs:+6~+16V
3.驱动部分峰值电流Io:1A
4.逻辑部分工作电流范围:0~36mA
5.5.控制信号输入电压范围控制信号输入电压范围 (IN1 IN2 IN3 IN4 IN5 IN6 IN7 IN8)
低电平:0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
6.使能信号输入电压范围(EN1 EN2 EN3 EN4)
低电平:0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效 )
7.存储温度:-25℃~+130℃
2、 调速模块
采用由单片机自带的定时器提供脉冲的PWM脉冲调速,即软件调速。给单片机的定时器赋初值,使他产生一定周期的脉冲,不断调整占空比,就可实现无级调速。而且此种方法不用外加电路,使外围成本降低。
3、电源的选择
方案一:所有的器件采用单电源供电,这样的供电方式比较简单;但是由于电机启动瞬时电流比较大,会造成电源电压不稳定,有干扰,严重时可能会再成单片机系掉电,缺点十分明显。
方案二:双电源供电。将电动机的电源与单片机的电源与其外围电路隔离开,这样做虽然不如单电源方便,但可以将电动机驱动造成的干扰消除掉,提高了系统的稳定性。
我们认为设计的稳定性更可靠更重要,故采用方案二。
4、显示模块
采用LED数码管,我们这次做的小车只是显示小车的速度,并没有其他的输出,虽然数码管消耗大,但是输出稳定。
5、探测障碍物模块
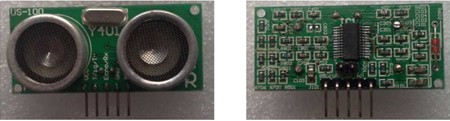
探测障碍物模块我们采US-100超声波测距模块,US-100超声波测距模块可实现 0~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式内带看门狗,工作稳定可靠。
平台选型说明
单片机开发板(以STC15F2K61S2芯片为控制核心)
L293D驱动模块 采用STCL298N芯片
超声波传感器模块
设计说明
1.我们以STC89S52为内核来作为数据处理和输出控制单元,通过传感器采集信号经单片机分析处理后控制电机运转,来实现小车的运行,并将速度实时数码显示出来,并且可通过按键来调节速度的快慢。
2.电路的具体设计:
数码管显示我们采用动态扫描的方式,用单片机的P0口控制数码管的段选、P2口的高四位控制数码管的位选;P2口的低四位分别控制三个红色发光二极管和一个蜂鸣器;电机控制单元我们采用 L293DL293D驱动模块作为驱动,与单片机的P1.0~P1.3连接,直接由单片机控制;转速控制单元通过四个按键来实现,分别与单片机的P1.4~P1.7相连.
3.系统的硬件设计
⑴电动机的驱动模块的设计与实现电机的驱动模块我们采用的是L9110专用驱动芯片,它具有较大的电流驱动能力,两个输出端能直接驱动电机的正反向运动,L9110集成电路的1、4引脚分别接直流电机的两端,V+为电动机正转信号,V-为电动机的反转信号,2、3引脚接电源的正极,5、8引脚接电源的负极。
L9110集成电路的特点:低静态工作电流;宽电源电压范围:2.5V-12V;每通道具有800mA连续电流输出能力;较低的饱和压降;TTL/CMOS输出电平兼容,可直接连CPU;输出内置钳位二极管,适用于感性负载;控制和驱动集成于单片IC 之中;具备管脚高压保护功能;工作温度:0℃~80℃。
⑵障碍物探测模块
本模块为了很好的实现避障功能我们采用了两种传感器共四个分别是:两个光电开关和两个反射式红外传感器。我们利用光电开关自身具备的光源,通过发射的光源对被检测物体反射、吸收、和透射光的变化量进行检测。我们将其安装在了车头的左右两侧,将他们能探测的距离调成相等的,使他们始终交替工作来探测前方的障碍物,在检测到障碍物反馈给单片机,经单片机分析处理后,使电机做出相应的转动。在车身的两侧我们安装的是反射式红外传感器,将左边的传感器能探测到的距离调整为14厘米,右边的调整为12厘米,使他们能够在安全的范围内躲避障碍物。
⑶显示模块
本模块实现小车的速度显示功能。采用四位LED数码管动态扫描显示。通过单片机的P0口以灌电流的方式驱动数码管,P2口控制位选。故选用一个四位一体共阳极数码管。段选共需8个限流电阻,位选需要四个电阻和四个驱动三极管。
4、系统的软件设计
单片机控制电路由一片89S51和外围电路组成。并且以89S51为控制的核心,负责电机驱动、数据显示、信号检测躲避障碍物等功能。
作品特色
该智能避障小车系统体积小,结构简单,程序调试方便,结构紧凑,测距范围比较大且测量误差小,制作成本低廉易于产品化,具有趣味性,具有使用价值。可用于距离探测和方位探测。采用单个换能器以测量点到点和点到面的距离。如用于液面,井深测量等。采用多个换能器以测量点到点的距离,并进行方位的确定,如方位入侵报警,汽车防撞及倒车雷达等
系统演示视频:http://v.eepw.com.cn/video/play/id/2389
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

