
作者:武昌理工学院 徐刚 杨智 刘慧琳
指导教师:邹熙 唐穗欣
作品简介
平台选型说明
STC15F2K61S2单片机开发板功能强大,操作性强。内部CPU为8051 CPU的增强型,1T,单时钟/机器周期,速度比普通8051快8-12 倍。61K的片内Flash,2K的SRAM和大容量的EEPROM,擦写次数10万次以上,可以满足我们系统的要求。另外开发板内部集成了8通道10位ADC模块,可以采集光照强度,我们的寻光模块可以直接使用。单片机内部已有PWM波生成程序,可以用来控制舵机,因此我们选择此款单片机。
设计说明
本系统的主要功能为自动寻光避障,以及遥控远程控制。整个系统电路设计精简,成本低,但功能强大,操作简便,且实用性很强。寻光部分我们用的是光敏二极管,通过AD对它的电压值进行采样,比较之后交由单片机处理,从而来控制小车前进后退和左转右转。避障部分我们用的是红外避障模块和超声波模块来共同完成。遥控模块主要利用的是红外传感原理,通过不同的键值,发射不同的编码,从而达到远程控制小车的目的。
一、 方案设计与选择
1. 1. 寻光模块
方案一:使用光敏电阻,利用光敏电阻阻值会随着光照强度的不同而变化,从而其两端电压也会随之变化这一性质,来对光敏电阻两端电压进行AD采样,将其采样电压交由单片机处理,通过单片机比较之后,控制小车执行相应的操作。
方案二:使用光敏二极管,二极管的输出电压会随着光照强度的变化而变化。因此可以用AD对其电压进行采样,然后再给单片机处理控制。
方案比较:由于光敏电阻反应过慢,小车往往容易在经过光源之后才检测到光,方位很难找准确,因此大大增添的程序的调试难度。相反光敏二极管对光的感应强度十分灵敏,因此我们选择用光敏二极管。
2. 2. 避障模块
方案一:采用超声波测距,通过单片机对其测量的数据进行处理,在距障碍物一定范围时让其自动避开障碍物。
方案二:采用红外避障模块。通过调节滑动变阻器 ,调节其壁障距离。当感应到障碍物时,传感器输出电平会发生变化,我们通过电平的变化来控制小车避开障碍物。
方案比较:两种方案避障效果都很好,但是红外传感能测距离太短,若安在小
3. 车前方,由于小车速度过快,当传感器电平发生变化时由于惯性作用,小车容易撞。因此我们在小车左右使用红外传感器进行壁障,小车前方用超声波进行避障。
4. 3. 遥控模块
遥控模块可以直接用芯片PT2262、PT2272、74LS00、74LS148等芯片搭建一个完整的无线遥控模块,16个按键有16个不同的编码,可以控制16种功能,十分方便且成本低,因此直接使用此方案。
二、系统整体方框图与各模块具体设计
1.系统总体方框图如下:
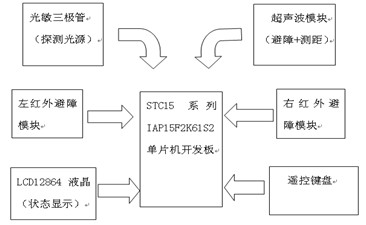
2.系统各模块具体设计
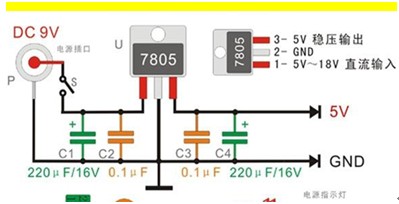
(1) 电源电路:
电源电路都是由12v干电池供电,经过7809稳压后供直流电机工作,经过7805稳压后供整个系统工作。直流电机我们通过用12V的蓄电池,接LM7809之后输出9V电压给电机和舵机供电。而单片机和硬件电路则用蓄电池,接LM7805之后输出5V电压给单片机和其他硬件模块供电,具体电路如下图所示:
(2) 超声波电路
HC-SR04 超声波测距模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路VCC 供5V 电源GND 为地线TRIG 触发控制信号输入,ECHO 回响信号输出等四支线,实物图如下所示:

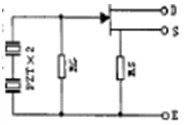
(3) 传感电路
红外传感电路是通过读取光传感二极管电平值来控制小车的,哪边测到高电平,小车就往反方向转,电路图如下所示:
(4) 直流电机控制电路
直流电机驱动电路用来控制小车的启动、停止、前进、后退、快速、慢速等操作。以L298芯片作为直流电机的主控芯片,电机接其中两个输出端,具体电路如下图所示,
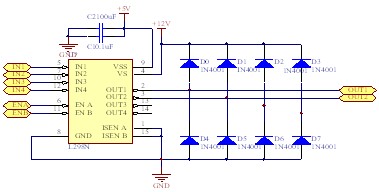
其中8个二级管起续流和保护作用,防止各端口相互串扰。四项控制信号分别接IN1~IN4。不同的二进制编码分别控制电机的不同运动。供电电源有滤波处理,使芯片工作更稳定。
(5)舵机控制电路
舵机直接与单片机相接,通过将其他模块传回来的信息进行处理来来时时调整小车前进的方向,来实现自动寻光避障。
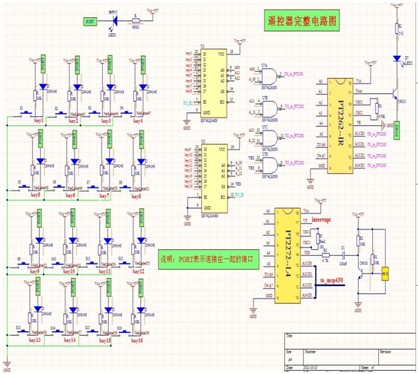
(6)遥控部分电路
遥控模块是通过按键的编码不同而执行不同的操作用来远程控制小车启动、停止、前进、后退、左转、右转、快速、慢速以及让小车进入自动寻光避障模式。遥控模块具体电路如下:
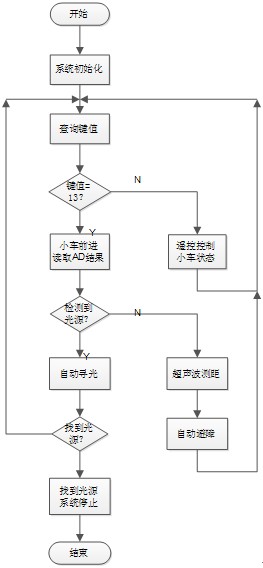
软件设计部分
本系统软件部分实现了对小车各种状态的控制,通过两路PWM波分别控制直流电机的启动、停止、前进、后退、速度以及舵机的旋转角度;通过开发板内置的AD模块实现对7路光强的转换;通过查询左右两个避障模块的电平实现左右避障;通过控制超声波测距模块实现前方避障。具体流程图如下所示:
作品特色
本系统创新性的提出以红外光源来引导小车自动入库,还可以根据实际需要利用遥控器远程控制小车,此功能可应用于车载系统,为用户提供全新的驾驶体验。另外小车的自动避障功能可以运用在各种交通工具上,可以大大降低车祸的发生率。整个系统功能全面,成本低廉,实用性很强,具有良好的经济前景。
系统演示视频:http://v.eepw.com.cn/video/play/id/2674
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

