1、NRF24L01无线通信模块:
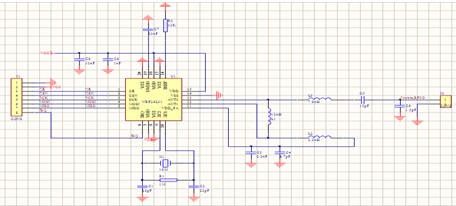
NRF24L01是一款工作在2.4Ghz--2.5Ghz世界通用ISM频段的单片无线收发器芯片。它包括;频率发生器、增强型SchockBurst模式控制器、功率放大器、晶体振荡器、调制器、解调器。输出功率、频道选择和协议的设置可通过SPI接口进行设置。工作电压为1.9V--3.6V,我们采用的工作电压为3.3V,SPI接口速率为0--8Mbps,我们利用两个NRF24L01模块,一个用于发送采集到的数据,一个用于接收采集到的数据,接收到的数据再通过串口通信传送到MATLAB的GUI界面上,也就是我们做的监控台上实时监控,我们通过对NRF24L01的CE,SCK,MISO,MOSI ,IRQ,CSN进行严格的时序操作以及寄存器进行正确的配置完成完整的收发功能,发送机工作在工作在发送模式下,接收机一直工作在接收状态,发射模块每三秒将采集到的数据发送给接收机,接收机通过串口将数据发送至上位机进行显示,实现了监控功能。具体的操作在我们的程序中会有体现!
NRF24L01设计原理图:
2、HC-SR04超声波测距模块:
HC-SR04超声波测距模块工作电压为5V,可以探测的距离为2cm-450cm,盲区为2cm,共有四个接口,除了Vcc和GND之外,还有Trig(控制端)和Echo(接收端),采用IO口Trig触发测距,给至少10us的高电平信号,这时模块自动发送8个40khz的方波,自动检测是否有信号返回,如果有信号返回,通过IO口Echo输出一个高电平,高电平持续的时间即为超声波从发射端到接收端的时间,那么测试距离=(高电平时间*(340m/s))/2,我们用单片机的一个定时/计数器对Echo的高电平时间进行计数,当高电平来的时候开始计数,因为晶振为12M,内部计数器对晶振脉冲经12分频后的脉冲计数,该脉冲的周期等于机器周期,当高电平变成低电平时,停止计数。那么测试距离=((TH0*256+TL0)*1.7)/100(cm)。
HC-SR04超声波测距模块原理图:

3、DHT11温湿度传感器:
DHT11温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器,具有极高的可靠性和稳定性,它包括一个电阻式感湿元件和一个NTC测温元件,采用单总线结构,单片机或者DHT11通过一个漏极开路或三态端口连至该数据线,以允许设备在不发送数据时能够释放总线,而让其他设备使用总线,单总线需要外接一个5.1K的上拉电阻,这样,当总线闲置时,其状态为高电平。由于是主从结构,只有主机呼叫从机时,从机才能应答,因此主机访问器件都必须严格遵循单总线时序,如果出现序列混乱,器件不会相应主机。工作电压为DC3.5-5.5V ,我们采用5V供电,除了Vcc和GND外还有一条串行数据线与单片机IO相连,一次传送40位数据,高位先出,数据格式为:8bit湿度整形数据+8bit湿度小数数据+8bit温度整形数据+8bit温度
小数数据+8bit校验位数据,当8bit湿度整形数据+8bit湿度小数数据+8bit温度整形数据+8bit温度小数数据==8bit校验位数据时,接收数据正确,否则放弃重新接收数据。
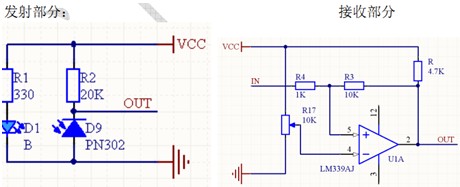
4、光电测速模块:
光电测速模块配合小车的码盘,采用槽型对射光电,和施密特触发器去抖动脉冲,通过单片机的定时/计数器对脉冲进行计数,小车轮子直径为26cm,码盘一共有20个孔,则小车的速度为V=计数脉冲*1.3/3(cm/s),通过小车的速度值可以判断小车的行驶情况。
5、TCRT5000四路循迹传感器:
在循迹黑线时,我们采用了三个TCRT500红外循迹传感器,另外一个用于检测迷宫中的白线,使用红外线发射和接收管等分立元件组成探头,并使用LM339电压比较器加入迟滞回路防止临界输出抖动做为核心器件构成中控电路,工作电压为3V--6V,典型动作电压为5V,我们采用5V供电,检测到白线输出电压接近0V,检测到黑线输出电压接近为5V,根据输出电压的变化可以进行智能循迹。
TCRT5000循迹对管:
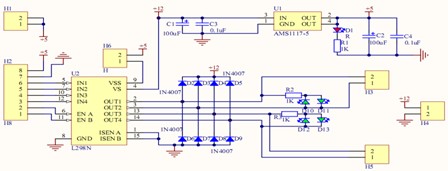
6、直流电机驱动模块:
L298N内部含有4通道逻辑驱动电路,是一种二相和四相电机的专用驱动器,内含两个H桥的高电压大电流全双桥式驱动器,通过H桥三极管轮流导通可以驱动电机的正反转。
L298N电机驱动电路:
7、光电传感器:
漫反射光电开关E18-D80NK可以检测前方0-80cm障碍物,集发射和接收于一体,我们用了三个光电传感器,其中两个放在前方45°处,用于在迷宫中自动壁障,中间一个用于检测要搬运物体的载体。
8、舵机模块:
S3010是泛用性三级马达模拟电路控制舵机,用于控制爪子的张开和闭合,工作电压为4V-6.0V,停止时消费电流为15MA,动作时消费电流为115--155MA,6.0V输出扭矩为5.2—7.8[Kg*cm],MG995舵机工作电压为3.0V--7.2V,用于控制机器臂的下降和上升,为大功率舵机,消费电流为200MA左右,因此我们用了一个74HC04芯片,74HC04芯片有六组反相器,我们用了一组用来增加带负载的能力,解决了舵机工作不稳定的问题,舵机控制需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms--2.5ms范围部分,对应的控制原理是这样的:
0.5ms-------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
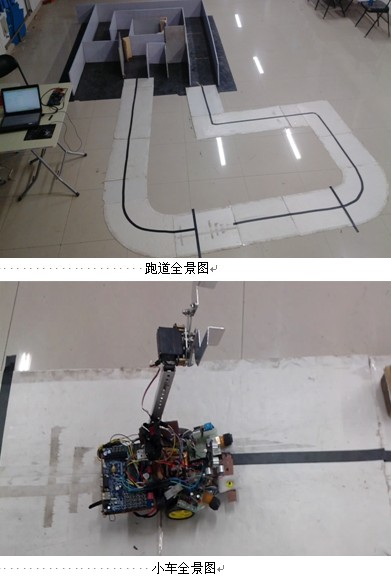
(二)设计原理:智能搬运小车以大赛指定开发板STC15F2K60S2为核心,通过L298N直流电机驱动模块驱动电机的正反转,红外光电传感器检测障碍物、TCRT5000循迹传感器检测道路上的黑线、HC-SR04超声波测距模块测量与前方和右方障碍物的距离、DHT11温湿度传感器测量小车所处环境的温湿度、NRF24L01无线通信模块发送和接受实时信息、光电测速模块测量小车行驶的速度、MG995舵机和Fubuta S3010舵机分别控制机械臂的上升、下降,爪子的张开、闭合,它们协调工作完成智能车搬运和探测小车所处环境的一些实时信息的功能,通过我们的无线通信及时反馈给监控平台,智能搬运小车完成整个功能总共用了26个IO口,3个定时/计数器,2个外部中断,2路PWM通道。
作品特色
智能搬运小车实用性在于:它能够完成智能搬运的功能,在救援过程中它可以将一些重要的物资像食物或者工具运送到被困的人员手中,既能解决人们恐惧的心理,又可以增加救援的时间。
智能搬运小车的先进性和创新性在于:它不仅仅能够完成智能搬运的功能,它还可以将它所处环境的一些即时信息每隔三秒反馈给我们的智能小车监测平台,便于我们实时的监测小车以及小车所处环境的情况,它不仅能反馈小车自身的信息像行驶的速度,便于我们了解小车是否还处于工作状态,而且可以反馈小车所处环境的信息像环境的温湿度以及通过超声波测距可以了解环境的复杂程度,也可以将它所处的环境的温湿度和地形的复杂程度反馈回我们的上位机,便于我们及时的了解被困人员所处的环境,便于制定更加合理的救援计划!
系统演示视频:http://v.eepw.com.cn/video/play/id/2915




 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

