
作者:乐山师范学院 谢伟 李杰 黄路平
指导教师:张自友 张久华
作品简介
摘要:本文介绍了飞思卡尔智能车系统。本智能车系统以飞思卡尔高性能16 位单片机
MC9S12XS128 为核心,通过用电感检测赛道导线激发的电磁波来引导小车行驶,用编码器
来检测小车的速度。我们使用集成运算放大器进行电磁信号放大,利用二极管倍压整流来
将放大后的电磁信号转换为正比于交流电压信号峰峰值的直流信号,通过AD 采样获得当
前传感器在赛道上的位置信息。速度控制上,我们使用模糊PID 算法进行控制。另外,为
了提高调试的方便性,我们开发了赛道计时系统,利用SD 卡存储信息,并且使用MATLAB、
Ansoft HFSS 进行辅助仿真。
单片机开发平台为CodeWarrior IDE 5.9.0,利用其中的Processor Expert模式进行硬件
初始化,在单片机运用方面取得了非常出色效果。
定程度上反映了高校学生科研水平。本章节详细阐述了智能车系统的研究背景和本智能小
车的系统总体概况。
1.1 大赛介绍
为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,
受教育部高等教育司委托(教高司函[2005]201 号文),由教育部高等自动化专
业教学指导分委员会(以下简称自动化分教指委)主办全国大学生智能汽车竞
赛。该竞赛以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一
种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以
“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学
校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,
激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实
的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
该竞赛由竞赛秘书处为各参赛队提供/购置规定范围内的标准硬软件技术平
台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学
生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的
全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔
的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算
机、机械与汽车等多学科专业的创意性比赛。该竞赛规则透明,评价标准客观,
坚持公开、公平、公正的原则,保证竞赛向健康、普及,持续的方向发展。
该竞赛以飞思卡尔半导体公司为协办方,得到了教育部相关领导、飞思卡尔
公司领导与各高校师生的高度评价,已发展成全国30 个省市自治区近300 所高
校广泛参与的全国大学生智能汽车竞赛。2008 年起被教育部批准列入国家教学
质量与教学改革工程资助项目中科技人文竞赛之一(教高函[2007]30 号文)。
全国大学生智能汽车竞赛原则上由全国有自动化专业的高等学校(包括港、
澳地区的高校)参赛。竞赛首先在各个分赛区进行报名、预赛,各分赛区的优
胜队将参加全国总决赛。每届比赛根据参赛队伍和队员情况,分别设立光电组、
摄像头组、电磁组、创意组等多个赛题组别。每个学校可以根据竞赛规则选报
不同组别的参赛队伍。全国大学生智能汽车竞赛组织运行模式贯彻“政府倡导、
专家主办、学生主体、社会参与”的16 字方针,充分调动各方面参与的积极性。
全国大学生智能汽车竞赛一般在每年的10 月份公布次年竞赛的题目和组织
方式,并开始接受报名,次年的3 月份进行相关技术培训,7 月份进行分赛区竞
赛,8 月份进行全国总决赛。
本次比赛分为光电、摄像头和电磁三个赛题组,在车模中使用透镜成像进行
道路检测方法属于摄像头赛题组,使用电磁信号巡线属于电磁赛题组,除此之
外则属于光电赛题组。本论文主要介绍电磁赛题组的智能车制作。
1.2 系统介绍
本报告中,我们介绍了飞思卡尔智能车软硬件及机械调校、算法方案,详尽
地阐述了我们的思想和创意。本届比赛新增电磁组,在没有以往经验和方案的
前提下,我们独立设计、实验创新,先后解决了赛道电源问题和电磁传感器问
题。而后经过多次数据采集及分析、方案论证、算法实现、试车试验,最终很
好的完成了本车设计。
本智能车系统包含以下几个部分:
1、智能车底盘部分(包括驱动电机、转向舵机、电池等)
2、测速编码器部分
3、磁场传感器部分
4、单片机最小系统及外围模块
5、电源模块
6、BTS7970/BTS7960/BTN7960 电机驱动模块
7、干簧管起跑线检测模块
8、赛道电源
9、赛道记时系统
10、SD 卡、Nokia5110 液晶等辅助调试模块
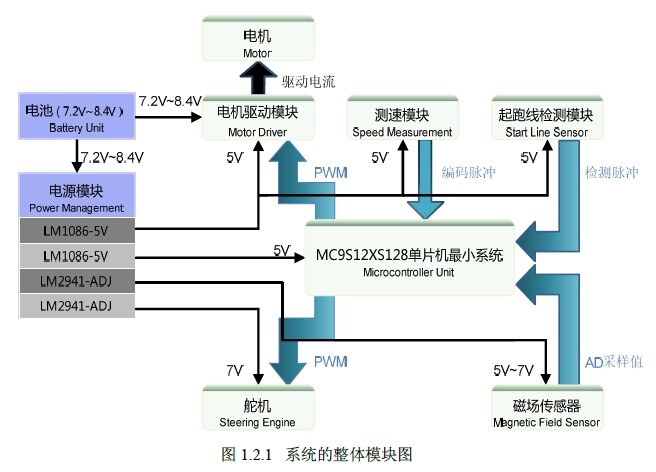
各个部分模块协同工作。考虑到系统中存在感性负载,存在大电流,我们将
电源模块分工细化,目的在于独立各个模块,降低各个模块之间的干扰和为各
个模块提供充足的电流。系统的整体模块图示如图1.2.1 所示。
在小车制作过程中,我们小组成员摸索传感器设计,试验小车机械结构,涉
猎小车运动控制,先后翻阅了大量书籍资料,大量相关技术报告,体会了从设
计到实现的酸甜苦辣。这些对我们从知识到实践,从感知到认知起到了非常好
的作用。整个过程中,我们组3 个成员独立负责各自任务,努力追求完美;协
同合作,努力做到极致。硬件方面,由于实验室条件有限,只能够用热转印法
制作单面板,我们就一遍一遍测量,一遍一遍布局,努力做到硬件稳定可靠,
最终成功做出稳定可靠,飞线极少的单面系统底板;软件方面,由于没有以往
经验,只能在现有传感器基础上,一次一次改变算法,一次一次更改传感器方
案,传感器也由第一代的2 个演变为后来的8 个、6 个传感器。总之,这个小车、
这份报告凝聚了我们小组的心血,也是我们追求卓越的体现!
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

