
作者:哈尔滨工程大学 郝奇毅 戴超 张智超
指导教师:张爱筠 管凤旭
作品简介
第一章 引言
1.1 概述
在本届智能模型车竞赛中,根据组委会要求的具体要求,本队采用了标准的汽车模型、直流电机和可充放电电池制作出了一个能够自主识别电流为20KHz,50—150mA导线线路的智能车,能够在比赛跑道上自主识别道路方向,能够稳定行驶、保持较高的速度。在为比赛准备的很长的一段时间里,我们深入学习、应用了嵌入式软件开发工具软件codewarrior和在线开发手段,自行设计了智能汽车自动识别路径的方案,制作了电机的驱动电路、模型车的电磁传感电路,编写了基于微控制器MC9S12XS128的智能车的控制程序。在智能车的设计过程中,我们利用了如下知识:传感器原理、自动控制、汽车电子、机械设计等。在对这些知识的综合运用过程中,我们对这些知识有了更深入的认识和理解,并能将所学的知识运用于实践中。
在设计的过程中,我们参考了很多文献资料。在组装车模和电路设计等过程中,我们的实践动手能力得到了极大的培养和提高。在设计智能车控制算法过程中,我们设计使用了多种控制算法,如舵机的PD算法和电机的PI算法。期间进行了无数次的实践和尝试,形成了最后的比赛方案。在思考控制算法的过程中,我们一直在追求稳、快的目标,在这个过程中我们的创造能力和实践能力得到了很大的提高。
1.2 技术报告结构
本技术报告的正文分为四个部分。第一部分是对整个系统实现方法的概要说明;第二部分是对机械结构的说明和对硬件电路的说明;第三部分是对系统软件设计部分的说明;第四部分是对开发工具、制作、安装、调试过程等所做的一些说明,以及模型车一些主要技术参数的说明。
第二章 设计方案概述说明
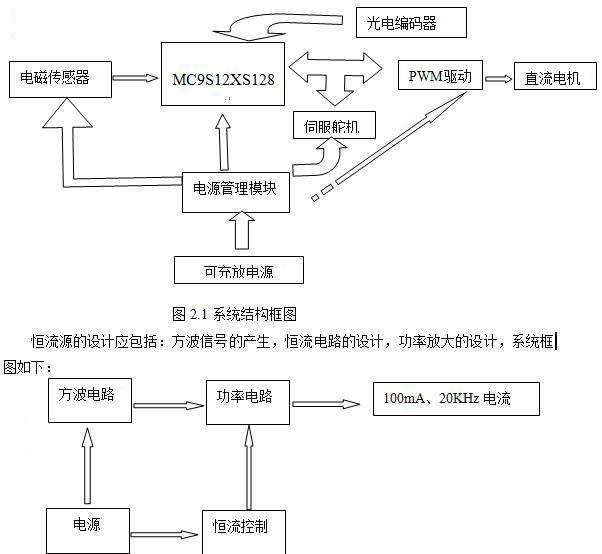
由于本电磁智能车模型采用A型车模,通过电磁传感器阵列来采集电流约为20KHz、100mA的导线的电磁场强度来检测和识别路径,通过MC9S12XS128的AD口进行采集、处理,进而控制电机和舵机,进行模型车的智能控制。
2.1 设计思路及方案的总体说明
根据电磁车循迹的要求,电磁车设计包括赛车的设计和恒流源的设计。
根据电磁传感器方案设计,赛车共包括五大模块:电磁传感器模块、速度传感器、MC9S12XS128模块,电机驱动模块、电源管管理模块。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

