
作者:同济大学 张良 潘明 刘莉
指导教师:朱劲
作品简介
摘要
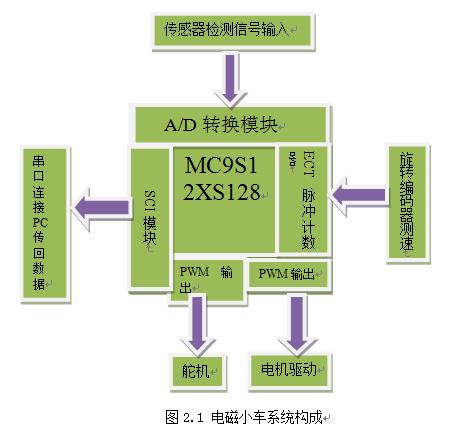
本文以第五届全国大学生智能车竞赛为背景,介绍了智能赛车设计、制作的技术信息。该比赛采用大赛组委会统一提供的1:10仿真车模,以Freescale半导体公司生产的16位单片机MC9S12XS128为核心控制器,采用Codewarrior IDE5.1作为开发环境,自主构思控制策略和算法结构,硬件上采用MC33886用两路PWM波控制电机,并另起一路PWM波控制转向舵机,传感器采用普通工字电感构成谐振回路,通过感应赛道导线上方的磁场,控制规定车模在50cm宽的赛道上稳定行驶。硬件上通过对汽车动力学理论的学习来优化智能车的机械结构,软件上通过对PID控制,Bang-Bang控制,以及模糊控制等理论的综合运用协调,来提高智能车的速度和鲁棒性。
关键词:智能车 单片机 电磁导航 PID控制器
第一章 系统设计概要
1.1 系统总体框架设计
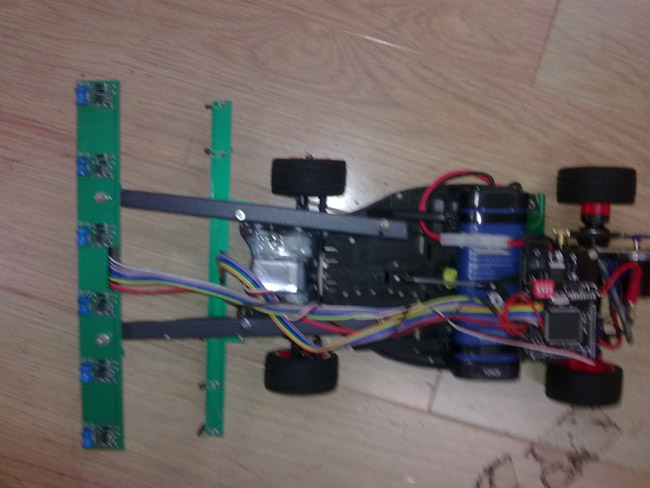
1.2 最终设计展示
第二章 赛车机械设计结构
2.1 前轮定位
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

