
作者:中国科学技术大学 王阳阳 张佳维 吴斌
指导教师:关胜晓 邵长星
作品简介
第一章绪论
智能车竞赛的目的是设计和制作一个完整的车模控制系统,或称之为车辆自动驾驶系统。其设计内容包括算法设计、机械设计、软硬件设计;制作内容包括机械制作、电路制作以及软件编程。当然,最后的调试以及控制参数的整定工作也是决定项目成败的关键所在。
思路及技术方案是一个工程项目的灵魂。因此,我们在设计和制作伊始就对思路与方案的选择非常仔细与谨慎。作为一个快速的随动控制系统。结合智能车设计的实际情况以及我们对于自动控制系统的设计经验。我们提出了,简单、稳定、快速、智能的八字方针作为模型车方案设计的指导原则。
经过对被控对像的分析。我们可以把智能车控制系统分为两个大的子控制系统。分别为:方向控制系统与速度控制系统。方向控制的作用就好比是驾驶员和他所控制的方向盘;速度控制系统的作用就好比是驾驶员和他脚下的油门与刹车。方向控制系统能使智能车沿着导引黑线行驶而不至偏移。速度控制能使智能车在直道上加速行驶而在入弯时刹车减速以尽量提高行驶速度和避免因入弯速度过快而造成的冲出赛道。
明显,速度控制器的设计质量是决定比赛成绩的关键所在。经过再进一步的分析。我们而经将速度控制系统分为两个子控制器。第一个控制器我们将其称为电机转速控制器。它和测速模块一起组成一个典型的直流电机速度控制闭环回路。而其输入值也就是给定值,由一个被称为“行驶速度优化判决器”的模糊控制器给出。“行驶速度优化判决器”的作用是由模型车当前的状态(速度、转弯程度等)经过模糊判决而得出当前状态下最大行驶速度的估计值。这个估计值也就是电机速度控制器的输入值,经过该控制器的控制,最终车模将行驶在“优化判决器”所计算出的速度上。
1.1 主要设计思路
智能车系统是一个各部分协调运作的控制系统。系统要完成从传感器接收、
微控制器判断计算,到执行机构执行的整个过程。系统设计要求单片机把路径
的迅速判断、相应的转向伺服电机控制以及直流驱动电机的控制精密地结合在
一起。传感器数据采集的失误,转向伺服电机控制的失当,都会导致模型车严
重抖动甚至偏离赛道;低效的直流电机驱动控制,会造成小车直线路段速度上
不去,弯曲路段入弯速度过快等问题。因此智能车各个部分之间的协调工作是
其正常行驶的基础。
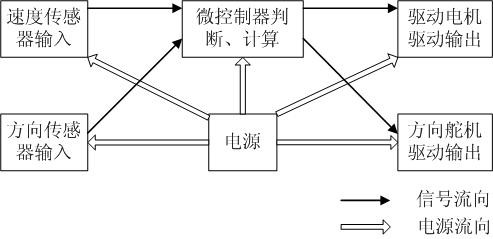
图1.1 系统功能图
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

