
帖子目录:
1.收货展示 http://forum.eepw.com.cn/thread/249412/1/#1
2.焊接展示 http://forum.eepw.com.cn/thread/249412/1/#3
3.上电调试 http://forum.eepw.com.cn/thread/249412/1/#4
4.LED和按键代码的调试 http://forum.eepw.com.cn/thread/249412/1/#5
5.在FreeRTOS系统上实现了简单的LED控制,ADC电压采集,和串口调试输出
有视频展示http://forum.eepw.com.cn/thread/249412/1/#8
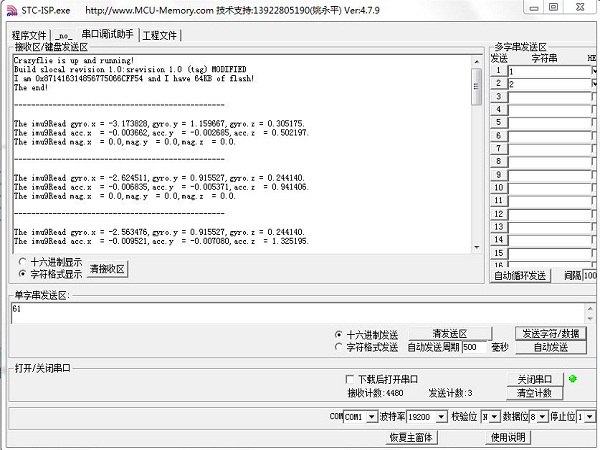
6.MPU6050传感器数据读取 http://forum.eepw.com.cn/thread/249412/1/#10
7.PWM控制电机代码调试 http://forum.eepw.com.cn/thread/249412/2/#11
8.移植crazyflie之角度传感器控制电机 (含视频) http://forum.eepw.com.cn/thread/249412/2
9.分析传感器与电机的对应关系 http://forum.eepw.com.cn/thread/249412/2/#13
10.添加指南针和高度传感器模块,有焊接图 http://forum.eepw.com.cn/thread/249412/2/#20
11.crazyradio的固件http://forum.eepw.com.cn/thread/249412/3/#22 c-razyradio-firmware-master.zip
12.crazyflie 在烈火四轴上移植 与Crazyflie PC client的通信演示(视频)包含我调试的crazyflie-firmware代码,里面有做好的工程,可以直接用。http://forum.eepw.com.cn/thread/249412/3/#24
13.四旋翼飞行器的飞行原理
...
2013.04.01
收到货了,为什么我的是下午收到的?听大家都在焊接,好激动啊!!!







 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

