
现在遇到问题,通过i2c配置mpu6050,一下是配置代码
mpu6050write(PWR_MGMT_1, 0x00);
mpu6050write(SMPLRT_DIV, 0x07);
mpu6050write(CONFIG, 0x06);
mpu6050write(GYRO_CONFIG, 0x18);
mpu6050write(ACCEL_CONFIG, 0x01);
在网上查到mpu6050上电后要等一会才能配置,所以配置前已经等待了将近1s,但是从串口返回的数据如下
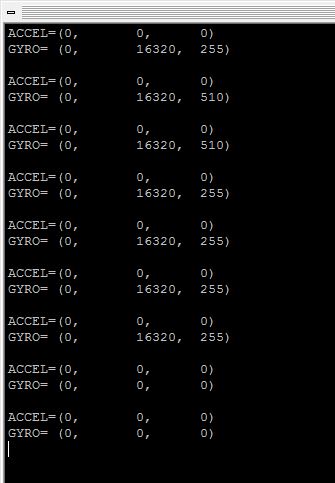
飞行器放在桌面上静止,加速度得到都是0,陀螺有两个轴在变化,求解mpu6050到底怎么配置???
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂