
接上贴(下载链接,视频连接均在上贴中)
http://forum.eepw.com.cn/thread/259554/1

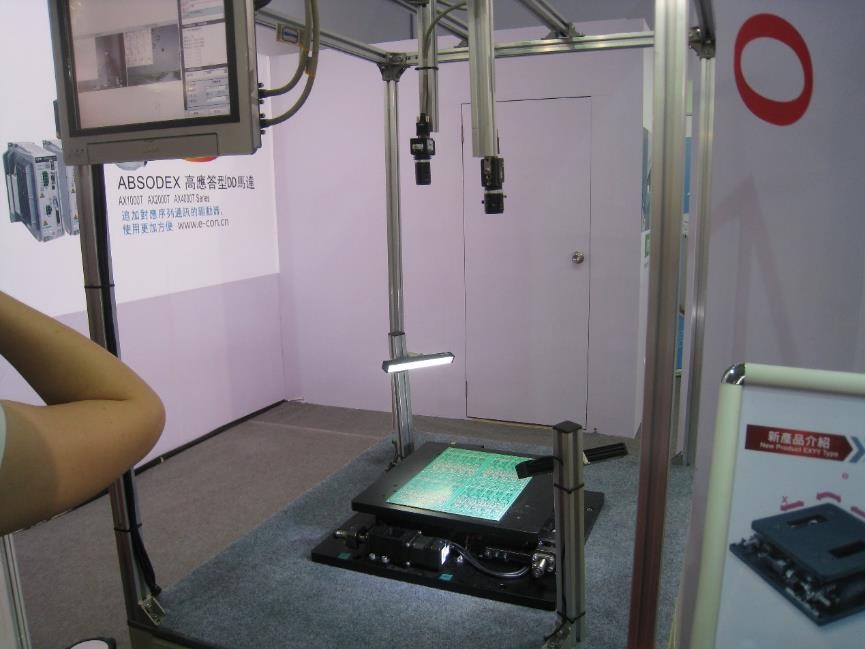
该为一家公司针对机械轴共振问题所提出的一个解决方案。
大概的原理就是:改变轴的材料,使得轴与系统其他部分的共振频率相离较远,加之其他紧固器件,减小震动问题。
从该公司给出的实时波形图来看,解决效果非常完美。
我觉得他们解决问题的思路非常赞。

该为惊鸿公司的迎宾机器人。
想想一个场景:当你走进一家高档酒店,门自动打开,然后露出一个这样的迎宾小姐,用很浓重地机器语说道,欢迎光临。
你什么感受?
我听到声音会吓得不敢抬下一步,再看到这脸部表情,我反而可能吓得倒退三步,然后在自动门的可察觉范围之外,门又关上了。我镇定下心情,自言自语道:难道我刚迈入了地狱之门?

该为柯马机器人正在演奏钢琴曲,貌似还是一首非常经典的曲子——《欢乐颂》。节奏比较慢,演奏结束后还会举起机械臂来回示意。很大材小用的感觉,也就是一个宣传手段吧。

该为柯马搬运机器人。外形上非常美观高端,动作也很轻盈。

该为柯马偏心腕机器人正在完成去毛刺的工作。


该为那智不二越的机器人正在进行打磨模具的工作。
当时观察的时候,产生一个问题:如何来控制模具打磨的程度?
我们仔细观察并没有发现任何位置装有摄像头,在打磨机上也没有发现可以作为传感器的器件。就向工作人员请教,被告知,这些模具的轮廓已经以一定的方式存储在机器人处理器中了,机器人只需要按照这种轮廓进行相应的操作即可。当继续被问及如何来控制精度问题时,工作人员告诉我们,为了达到一定的精度,就必须严格来控制机器人了,还有是,每个简单的动作都得要求严格,比如放置的模具必须放在槽中或者靠其他器件来固定。
当然,我们同时被告知,另一款更先进的机器人装有力矩传感器,这个问题就稍稍解决了。
当我们提到为什么不用摄像头时,考虑的更多还是成本问题。

该为青岛产业园带来的一个摆设吗?反正没有看到它动过。

该为上海硅步的双臂机器人。
张牙舞爪的样子看着很厉害,但是这个颜色啊……
看到左下角那个小家伙了吗?中间的矩形盒像什么?啊,又是一个Kinect。

深圳佳士科技股份有限公司的并联机器人,反正这家公司印象特别深刻——就是在用并联机器人抓iPhone 5s,而且其中看到不止一部。
莫非是富士康也来参加展览了?哎,这种噱头事情就不要再YY了。

该为VANTA搬运机器人。
一个亮点就是,在夹具的中间,也就是箭头所指向的地方,还有一个压平器件,一定程度上可以防止重物滑落。在操作过程中,有夹持盒装重物,也可以进行袋装重物的夹持。


该为西安乐博士在本次展会上展出的大小四轴飞行器。
这是一个很赞的、非常值得推荐的,公司?应该算是机构吧,侧重于学习和培训。
一直在与CMU的机器人学院合作——我觉得仅此一点就非常值得去关注。
使用的是一种机器人语言---ROBOTC。
是乐博士的培训网站 http://www.myrobotc.com/

该为新时达重载搬运机器人,采用平行四边形结构,可负载275Kg。所有集成线缆从中空的机械臂中穿过,工作半径也很大。搬运能力很强

该为新时达机器人与人对弈。貌似算法挺好的,看到的都一直在赢。问了工作人员,他只是说算法是从网上下载的,不过不是博弈树搜索。

该为新时达焊接机器人。焊嘴也是能够跟随工件转动而调整位置和角度,轨迹跟随性也很好。

该为新松国内首台自主研发的500Kg重载工业机器人。是目前国内载重能力最大的机器人了,不过现场没有进行演示,只是举着个广告牌慢慢的转动。

该为新松导航AGV。

该为新松桁架系统。

该为新松洁净机器人,主要用于LED芯片生产过程中搬运晶圆之类的物体,应该都是用于超净间的芯片生产中
More 更多:
1,新松的文案中提到“机器人或桁架机械手的加工生产线采用模块化设计,可以进行各种形式的组合,组成多台联机的生产线,充分满足不同的加工实际需求,与机床完美结合达到柔性制造”。
从中我们可以读出一点重要信息:模块化设计和柔性制造是一对因果关系,模块化生产是柔性制造的一种方式。这也就在一定程度上理解了为什么有人提出“模块化设计机器人”的观点了。
2,AGV的几种导航方式:电磁导航、磁带导航、激光导航等多种导航方式。
http://tieba.baidu.com/p/1821460119 这里有个详细的回答。
3,供电方式分为电池供电和感应供电。
类似于在固定路线的地面下铺设固定电磁场,时时进行线上供电,原理就是电磁感应。
4,AGV有多种驱动方式。
http://club.1688.com/article/35555945.html
5,文案中提到“多轴型控制柜,为新一代机器人控制器软件,实时Linux平台,具有多种软件安全保护功能,与‘工业计算机+ 控制器’结构的运动控制系统相比,具有更高的可靠性、稳定性、抗干扰性和更好的性价比,内置PLC输出可根据控制对象不同配置继电器型输出和晶体管型输出,同时还具有优越的运动控制功能和性能”。
全是“大白空”的话。
可搜索到新松的总裁曲道奎先生曾写过一篇会议论文就是“基于MontaVista Linux的开放式机器人控制器研究与实现”。其中就借用Linux的开放和移植特点,并采用了CAN总线作为系统总线,实现了机器人的控制器设计。

该为易控自动化的机密定位机器人设备。吐槽一下,工作人员告诉说,他们为了更安全可靠使用了两个摄像头。而两个摄像头不是为了什么“双眼效应”来构造出3D效果 ,它们真正需要的就是2D,仅此而已。
相比于川崎宁愿只要一个摄像头,很难判断他们谁是真正的土豪啊?
上篇:http://forum.eepw.com.cn/thread/259554/1
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

