
4、器材采购
首先是选择主控:
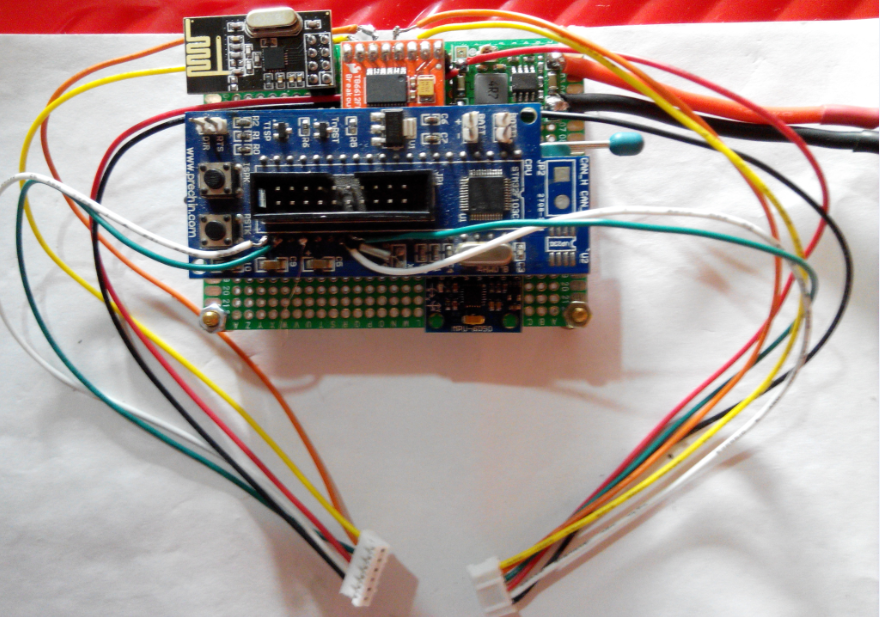
楼主迅速翻了下库存,找到一块STM32最小系统,是普中3合1单片机开发板配的。那就是你了,省得再买了,爆照一张:

此最小系统有一些IO没有引出,正好能插到40P的锁紧座里。 这玩意娇贵,45元一个。
链接:http://detail.tmall.com/item.htmid=39432065683&abbucket=7&_u=do3518l3102
建议用19.9的代替
链接:http://item.taobao.com/item.htmid=22097803050&ns=1&abbucket=7&_u=do3518ld296#detail
然后是传感器:
现在6050很便宜了,之前13年的时候,大概十五六块一个,现在是白菜价了。

链接:http://item.taobao.com/item.htm?id=16630417522&_u=io3518lba8a
然后是选择电机:
首先是扭力,扭力稍大的电机会比较好,根据牛顿第二定律,可以提供较大的加速度,可以选用扭力稍大的直流电机或直接选用减速电机。转速也不能太低,不然就等着悲剧了。看上一款带编码器的国产电机,比较便宜,先搞来耍耍:

参数如下:
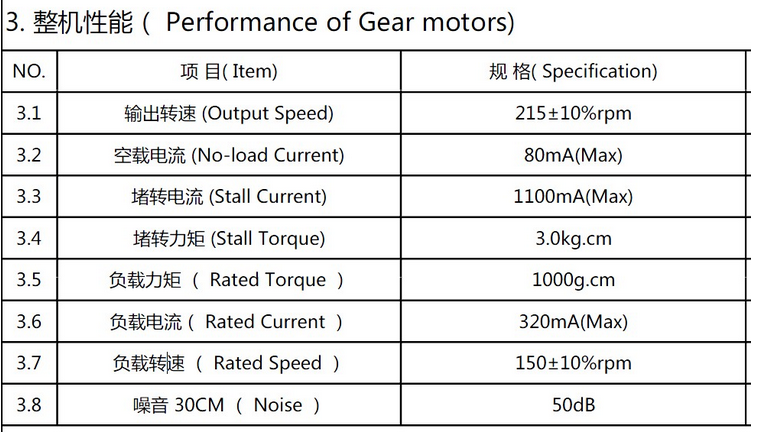
链接:http://item.taobao.com/item.htm?spm=a1z09.2.9.12.qgdl8p&id=41123753194&_u=io3518lb686
然后就是电机驱动
选择驱动能力大一点的驱动器,否则容易烧坏,当然自己用MOS搭H桥也行。一般用L298N的人挺多,出于体积考虑,用一款 TB6612FNG,据说效率发热均超越298,价格当然也贵些.

链接:http://item.taobao.com/item.htm?spm=a1z09.2.9.11.bAEm4d&id=40141009198&_u=io3518l401c
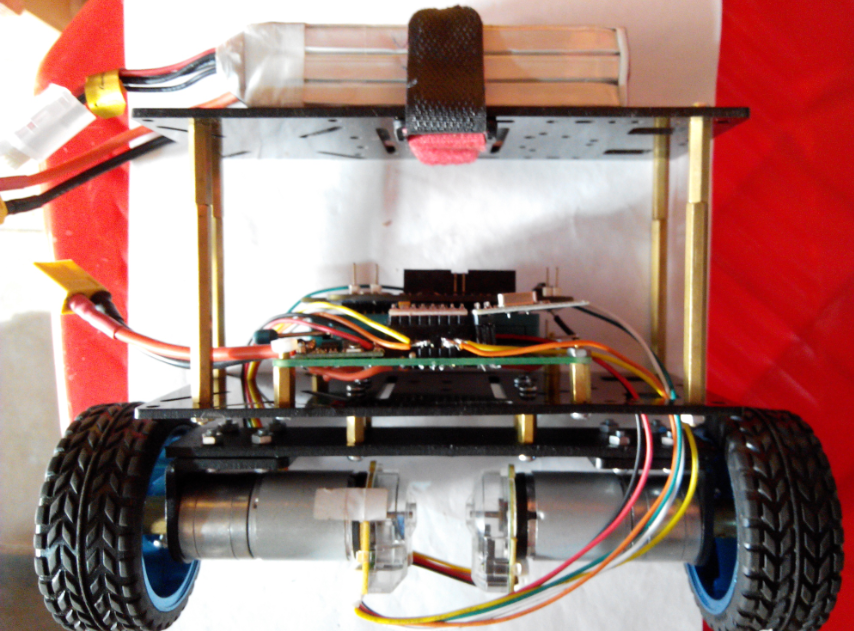
电池部分
楼主是玩航模的,手里有几块航模电池,刚好派上用场。价钱有点贵,还得用平衡充。考虑成本可以用三节18650电池串联起来

链接:http://item.taobao.com/item.htm?spm=a1z09.2.9.399.LfhZXi&id=15931125746&_u=io3518l51a0
光有了电机电源还不行,得有编码器和单片机电源,于是乎,搞了个超小5V稳压模块:
链接:http://item.taobao.com/item.htm?spm=a1z09.2.9.11.JMIVO3&id=19113810108&_u=io3518l2e16
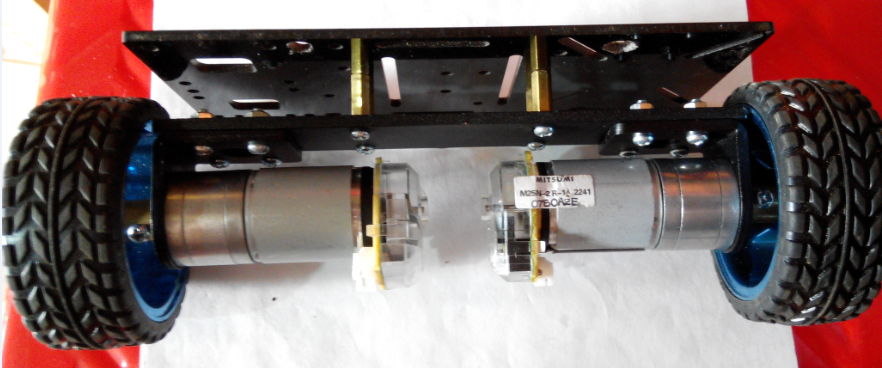
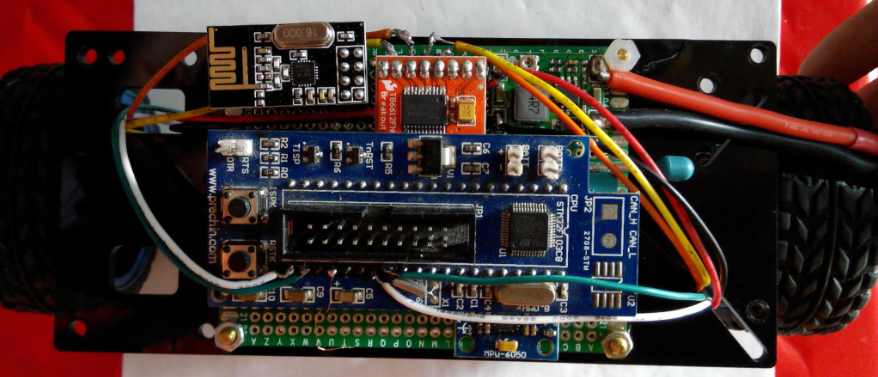
现在感觉差不多了,再加上轮子螺丝铜柱之类的小物件,一辆小车基本上就有了。为了便于控制,加上一个Nrf2401无线模块模块,这样就能随性心所欲控制小车前进后退转弯啦。
注:这种便宜的,通讯距离较短,不过室内玩基本够了

链接:http://item.taobao.com/item.htm?spm=a1z09.2.9.396.ondoZa&id=18122687378&_u=io3518l9385
考虑到遥控部分,手里刚好有个参加四轴DIY活动时购买的遥控,刚好派上用场。这个可以自己做,比较便宜:

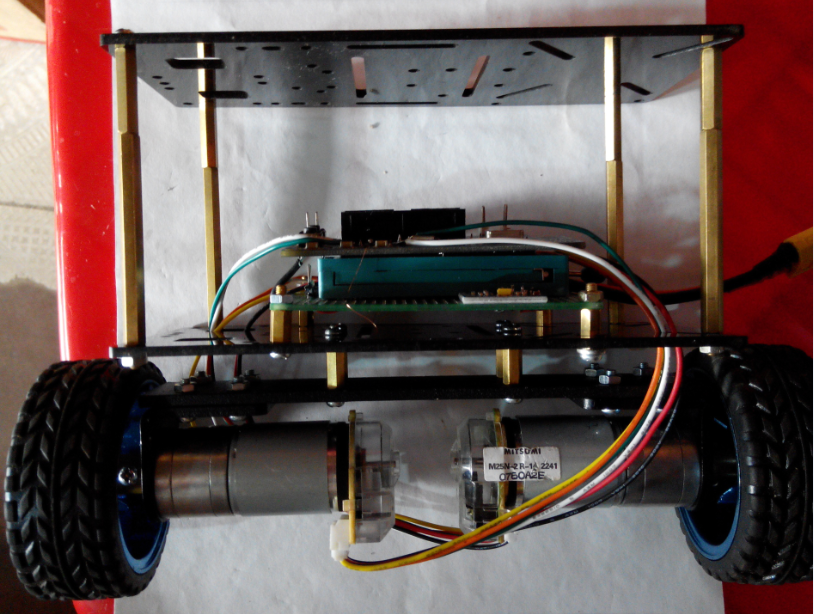
车模是网上买的,直接搜自平衡小车就有。选择你喜欢的车模吧。喜欢自己动手的就买两块亚克力板自己打洞也行。铜柱螺丝等小物件别忘了













 从某一层开始,就可以一直往下看了,不用跳来跳去,也挺好呀
从某一层开始,就可以一直往下看了,不用跳来跳去,也挺好呀  这个可以有,加了摄像头想拍啥拍啥。要不要一起搞
这个可以有,加了摄像头想拍啥拍啥。要不要一起搞  我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

