
2.6 设置vncserver
首先
apt-get update
然后,
apt-get install tightvncserver
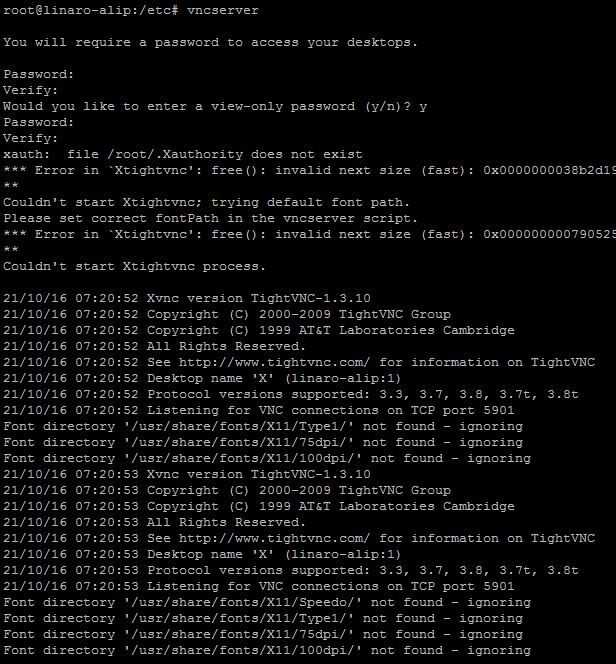
然后vncserver设置启动窗口,设置登录访问密码等
我的这次木有成功,主要是展示一下如何做,是有些packages 没有装好,而且有些包装重复了。这个以后再弄。
3.3 配置AWS SDK,这个是AWS CLI,就是键盘敲打模式,不让用图形方式。
首先安装Arrow Electronics AWS-demo,命令如下
$ cd ~
$ git clone https://github.com/ArrowElectronics/aws-iot-device-sdk.git
$ cd aws-iot-device-sdk/scripts
$ ./install.sh
不过到现在,还没有把git安装上,于是乎
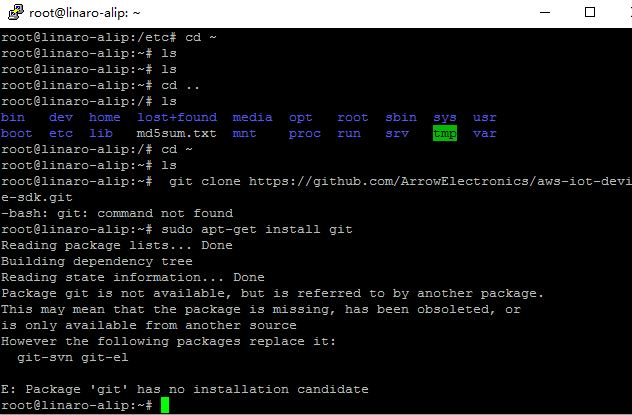
换条路线,安装依赖包
$ sudo apt-get update
$ sudo apt-get -y install python-pip libperl-dev libgtk2.0-dev
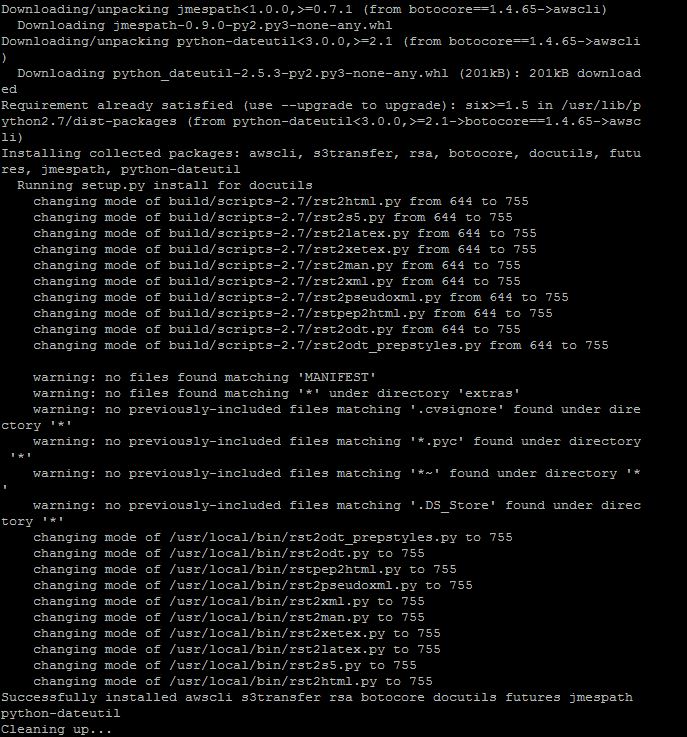
$ pip install awscli
安装完了AWS CLI
4 配置云端访问
4.1 AWS的权限登录
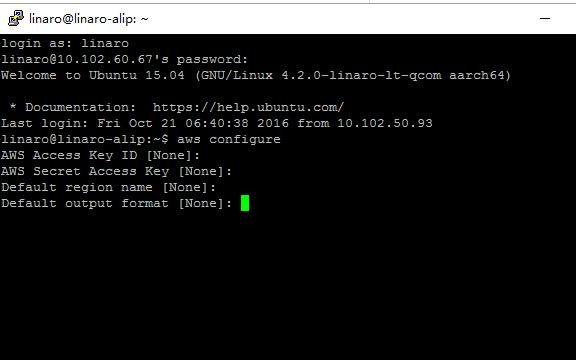
说明,使用命令是AWSCLI的 aws configure,然后依次出现以下信息,
AWS Access Key ID [None]: <enter Access Key Id>(这个是登录的用户名,是个人信息里面的一组数字ID组成的)
AWS Secret Access Key [None]: <enter Secret Access Key> (正式是验证的安全码,在IAM服务页找,然后复制)
Default region name [None]: us-east-1 (这个是开放的美国东1区,不是每个区都支持所以服务的)
Default output format [None]: <leave blank and just press enter/return>(可以留空不写)
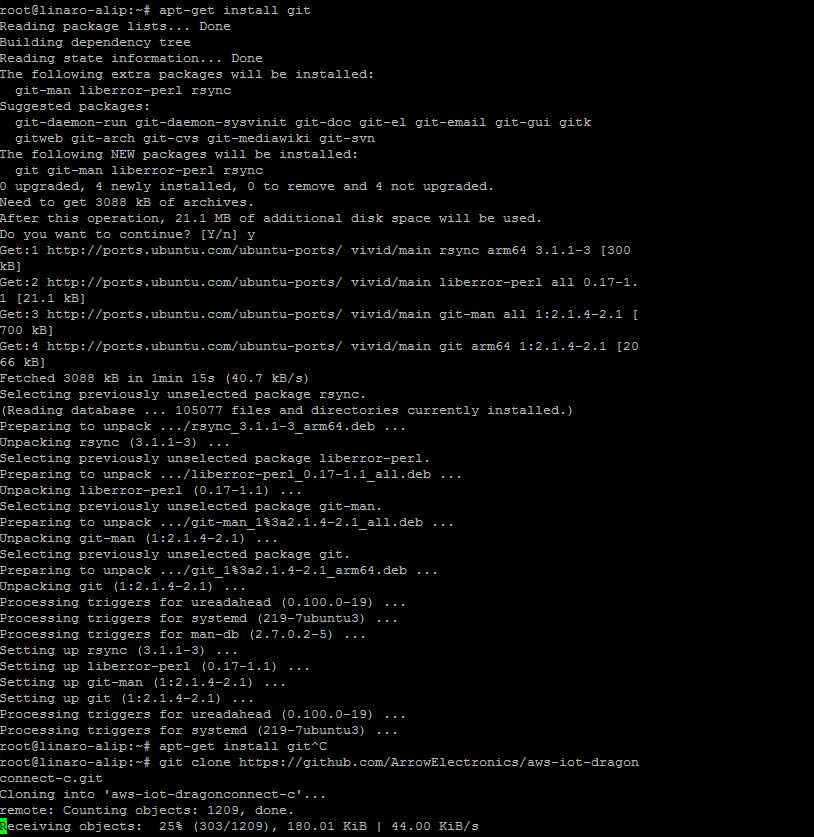
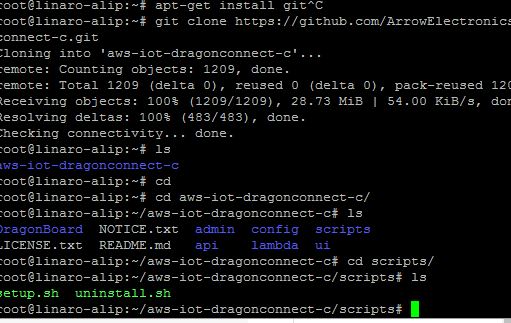
4.2 创建目录并下载程序
创建目录
$ mkdir -p /home/linaro/Documents/arrow
进入该目录
$ cd /home/linaro/Documents/arrow
然后git clone范例程序
$ git clone https://github.com/ArrowElectronics/aws-iot-dragonconnect-c.git
$ cd aws-iot-dragonconnect-c/
运行setup script
$ cd scripts
$ ./setup.sh
然后就可以开始运行该程序了
$ cd /home/linaro/Documents/arrow/aws-iot-dragonconnect-c/DragonBoard/bin
$ sudo ./aws_demo
在初始的版本中,还需要用apt-get install git来安装git。
在上面的setup.sh的script命令文件中,在登录成功的账号下,完成了AWS的配置全过程,包括创建和上传jason格式的lambda函数,确定endpoint等。
4.3 connnect-C程序解析
这个文件在Dragonboard上执行的是C语言的aws_demo.c,主要代码见后,(参见https://github.com/ArrowElectronics/aws-iot-dragonconnect-c/blob/master/DragonBoard/src/aws_demo.c#L1-L1)
其中RootCA是公共的秘钥,在对应的Cert目录下,通过MQTT的订阅功能,可以提供对应板载音量按键的的访问和控制功能。程序首先载入参数设置,如果没有则需要新录入,然后listen对应的event。
| #include <stdlib.h> | ||
|
#include <ctype.h> |
||
| #include <unistd.h> | ||
| #include <signal.h> | ||
| #include <memory.h> | ||
| #include <sys/time.h> | ||
| #include <limits.h> | ||
| #include <linux/input.h> | ||
| #include "glib.h" | ||
| #include "cJSON.h" | ||
| #include "gpio.h" | ||
| #include "led.h" | ||
| #include "mqtt.h" | ||
| #include "util.h" | ||
| #include "mtime.h" | ||
| #define GPIO12 12 | ||
| #define MAX_BUF 40 | ||
| #define MAX_PAYLOAD 100 | ||
| #define VOL_UP_EVENT "/dev/input/event1" | ||
| #define VOL_DOWN_EVENT "/dev/input/event0" | ||
| //Prototypes | ||
| int RegisterEventHandler(char *event, GIOFunc event_fp, void* context); | ||
| gboolean On_VolUp_ButtonPress(GIOChannel *source, GIOCondition condition, gpointer data); | ||
| gboolean On_VolDown_ButtonPress(GIOChannel *source, GIOCondition condition, gpointer data); | ||
| //TODO: Move these in a separate file | ||
| int MSG_GetDesiredState( int payload_len, char * payload, bool *des_state); | ||
| int MSG_SetReportedState( int payload_len, char * payload, bool rep_state); | ||
| //Globals | ||
| char certDirectory[PATH_MAX + 1] = "../certs"; | ||
| char HostAddress[255] = "__aws_host__"; | ||
| uint16_t port = 8883; | ||
| char vol_button_topic[]="things/%s/audio/events"; | ||
| char led_state_sub_topic[]="$aws/things/%s/shadow/update/delta"; | ||
| char led_state_pub_topic[]="$aws/things/%s/shadow/update"; | ||
| GMainLoop* loop = NULL; | ||
| /******************************************************************************* | ||
| * parseInputArgsForConnectParams | ||
| * | ||
| ********************************************************************************/ | ||
| void parseInputArgsForConnectParams(int argc, char** argv) { | ||
| int opt; | ||
| while (-1 != (opt = getopt(argc, argv, "h:p:c:"))) { | ||
| switch (opt) { | ||
| case 'h': | ||
| strcpy(HostAddress, optarg); | ||
| DEBUG("Host %s", optarg); | ||
| break; | ||
| case 'p': | ||
| port = atoi(optarg); | ||
| DEBUG("arg %s", optarg); | ||
| break; | ||
| case 'c': | ||
| strcpy(certDirectory, optarg); | ||
| DEBUG("cert root directory %s", optarg); | ||
| break; | ||
| case '?': | ||
| if (optopt == 'c') { | ||
| ERROR("Option -%c requires an argument.", optopt); | ||
| } | ||
| else if (isprint(optopt)) { | ||
| WARN("Unknown option `-%c'.", optopt); | ||
| } | ||
| else { | ||
| WARN("Unknown option character `\\x%x'.", optopt); | ||
| } | ||
| break; | ||
| default: | ||
| ERROR("Error in command line argument parsing"); | ||
| break; | ||
| } | ||
| } | ||
| } | ||
| /******************************************************************************* | ||
| * Signal Handler | ||
| * | ||
| * Called when CTRL-c is pressed to quit the application | ||
| * | ||
| ********************************************************************************/ | ||
| void CTRL_C_Handler(int sig) | ||
| { | ||
| if(loop) | ||
| g_main_loop_quit (loop); | ||
| INFO("CTRL-c pressed!"); | ||
| } | ||
| gboolean timer_func(gpointer user_data) | ||
| { | ||
| //INFO("."); | ||
| // process mqtt traffic during the main loop | ||
| iot_mqtt_yield(10); | ||
| return 1; | ||
| } | ||
| /******************************************************************************* | ||
| * Main | ||
| * | ||
| ********************************************************************************/ | ||
| int main(int argc, char** argv) | ||
| { | ||
| IoT_Error_t rc = NONE_ERROR; | ||
| int32_t i = 0; | ||
| int ret =0; | ||
| char rootCA[PATH_MAX + 1]; | ||
| char clientCRT[PATH_MAX + 1]; | ||
| char clientKey[PATH_MAX + 1]; | ||
| char CurrentWD[PATH_MAX + 1]; | ||
| char cafileName[] = "/rootCA.crt"; | ||
| char clientCRTName[] = "/aws.crt"; | ||
| char clientKeyName[] = "/aws.key"; | ||
| char* thingID; | ||
| // | ||
| //Register ctrl-c handler | ||
| // | ||
| signal(SIGINT, CTRL_C_Handler); | ||
| // | ||
| //Parse Input-parameters | ||
| // | ||
| parseInputArgsForConnectParams(argc, argv); | ||
| // | ||
| // Get the ThingID/MachineID | ||
| // | ||
| thingID = GetMachineID(); | ||
| // | ||
| // Export GPIO12 for LED output | ||
| // | ||
| ret = Export_GPIO(GPIO12); //Export GPIO12 for LED output | ||
| if (ret != 0) { | ||
| ERROR("Could not export LED GPIO"); | ||
| } | ||
| // | ||
| //Register Event-handler for Vol+/- button | ||
| // | ||
| ret = RegisterEventHandler(VOL_UP_EVENT, On_VolUp_ButtonPress, (void*) thingID); | ||
| if (ret != 0) { | ||
| ERROR("Could not register EventHandler"); | ||
| } | ||
| ret = RegisterEventHandler(VOL_DOWN_EVENT, On_VolDown_ButtonPress,(void*) thingID); | ||
| if (ret != 0) { | ||
| ERROR("Could not register EventHandler"); | ||
| } | ||
| // | ||
| //Create the mainloop for polling the button events | ||
| // | ||
| loop = g_main_loop_new( NULL, false ); | ||
| if(!loop) { | ||
| ERROR("Could not Create Main loop"); | ||
| return -1; | ||
| } | ||
| // | ||
| //Setting path to private key and certificates | ||
| // | ||
| sprintf(rootCA, "%s%s", certDirectory, cafileName); | ||
| sprintf(clientCRT, "%s%s", certDirectory, clientCRTName); | ||
| sprintf(clientKey, "%s%s", certDirectory, clientKeyName); | ||
| INFO("ThingID: %s", thingID); | ||
| INFO("AWS IoT SDK: %d.%d.%d-%s", VERSION_MAJOR, VERSION_MINOR, VERSION_PATCH, VERSION_TAG); | ||
| INFO("rootCA: %s", rootCA); | ||
| INFO("clientCRT: %s", clientCRT); | ||
| INFO("clientKey: %s\n", clientKey); | ||
| struct stat reqFileStat; | ||
| if (stat(rootCA, &reqFileStat) < 0 || stat(clientCRT, &reqFileStat) < 0 || | ||
| stat(clientKey, &reqFileStat) < 0) | ||
| { | ||
| ERROR("Root certificate and client certificate and key MUST be present."); | ||
| exit(1); | ||
| } | ||
| // | ||
| // Connect MQTT client | ||
| // | ||
| INFO("Connecting to %s:%d", HostAddress, port); | ||
| rc = MQTT_Connect(HostAddress,port, thingID, rootCA, clientCRT, clientKey); | ||
| if (NONE_ERROR != rc) { | ||
| ERROR("Error[%d] connecting to %s:%d", rc, HostAddress, port); | ||
| } | ||
| // | ||
| // Subscribe to LED status-changes topic | ||
| // | ||
| char topic[512]; | ||
| sprintf(topic, led_state_sub_topic, thingID); | ||
| INFO("Subscribing to topic:%s", topic); | ||
| rc = MQTT_Subscribe(topic, QOS_0, MQTTcallbackHandler); | ||
| if (NONE_ERROR != rc) { | ||
| ERROR("Error[%d] subscribing to topic: %s", rc, led_state_sub_topic); | ||
| } | ||
| //iot_mqtt_yield(1000); //TODO: clarify | ||
| // | ||
| //Hook in a function into main loop that calls iot_mqtt_yield in regular intervals | ||
| // | ||
| g_timeout_add(1000, timer_func, 0); | ||
| // | ||
| //start the main loop | ||
| //This call is blocking until the main loop is exited with a call to g_main_loop_quit(loop) | ||
| //from the CTRL-C handler; | ||
| INFO("Entering main-loop, please press ctrl-c to quit the demo-app:"); | ||
| g_main_loop_run( loop ); | ||
| INFO("Cleaning up application ..."); | ||
| //Unsubscribe from Topics | ||
| //Disconnect MQTT connection | ||
| //Unregister GPIO-EventHandlers | ||
| //UnExport GPIO's | ||
| //Destroy main loop | ||
| if(loop) | ||
| g_main_loop_unref(loop); | ||
| return rc; | ||
| } | ||
| /******************************************************************************* | ||
| * | ||
| * | ||
| ********************************************************************************/ | ||
| int RegisterEventHandler(char *event, GIOFunc event_fp, void* context) | ||
| { | ||
| GIOChannel *c1=NULL; | ||
| c1 = g_io_channel_new_file(event, "r", NULL); | ||
| if(!c1) | ||
| return -1; | ||
| g_io_channel_set_encoding(c1, NULL, NULL); | ||
| //g_io_add_watch(c1, G_IO_IN, event_fp, context); | ||
| g_io_add_watch_full(c1, G_PRIORITY_HIGH, G_IO_IN, event_fp, context, NULL); | ||
| return 0; | ||
| } | ||
| /******************************************************************************* | ||
| * MQTT Callback Handler | ||
| * | ||
| * Is called when the LEd status changes () | ||
| ********************************************************************************/ | ||
| int MQTTcallbackHandler(MQTTCallbackParams params) | ||
| { | ||
| IoT_Error_t rc = NONE_ERROR; | ||
| int ret; | ||
| bool des_state, rep_state; | ||
| int payload_len = (int)params.MessageParams.PayloadLen; | ||
| char* payload = (char*)params.MessageParams.pPayload; | ||
| //Receive desired LED state in payload | ||
| INFO("Subscribe callback"); | ||
| INFO("%.*s\t%.*s", | ||
| (int)params.TopicNameLen, params.pTopicName, | ||
| (int)params.MessageParams.PayloadLen, (char*)params.MessageParams.pPayload); | ||
| //Read the desired state from message | ||
| ret = MSG_GetDesiredState( payload_len, payload, &des_state); | ||
| if(ret !=0) | ||
| goto JSON_ERROR; | ||
| //Update current LED- and GPIO- state to the desired state | ||
| INFO("Updating state: %d\n",des_state); | ||
| SetLEDState(UserLED_4, des_state); | ||
| Write_GPIO(GPIO12, des_state); | ||
| //Write response message | ||
| char msg_payload[MAX_PAYLOAD]; | ||
| payload = msg_payload; | ||
| payload_len = MAX_PAYLOAD; | ||
| LED_State led_state; | ||
| GetLEDState(UserLED_4, &led_state); | ||
| ret = MSG_SetReportedState( payload_len, payload, (int)led_state); | ||
| if(ret !=0) | ||
| goto JSON_ERROR; | ||
| char topic[512]; | ||
| sprintf(topic, led_state_pub_topic, GetMachineID()); | ||
| printf("Sending payload: %s", payload); | ||
| rc = MQTT_Send_Message(topic, payload, strlen(payload) ); | ||
| if (NONE_ERROR != rc) | ||
| ERROR("Could not publish new LED state to topic: %s", topic ); | ||
| return 0; | ||
| JSON_ERROR: | ||
| ERROR("JSON format Error! %s", (char*)params.MessageParams.pPayload); | ||
| return -1; | ||
| } | ||
| /******************************************************************************* | ||
| * | ||
| * | ||
| ********************************************************************************/ | ||
| gboolean On_VolUp_ButtonPress(GIOChannel *source, GIOCondition condition, gpointer data) | ||
| { | ||
| IoT_Error_t rc = NONE_ERROR; | ||
| GError *error=0; | ||
| char buf[10]; | ||
| char payload[MAX_PAYLOAD]; | ||
| struct input_event event; | ||
| gsize bytes_read; | ||
| //read and clear the event | ||
| g_io_channel_seek_position(source, 0, G_SEEK_SET, 0); | ||
| g_io_channel_read_chars(source, (gchar*) &event, sizeof(event), &bytes_read, NULL); | ||
| // if(bytes_read >0) | ||
| // printf("Event1: keypress value=%x, type=%x, code=%x\n", event.value, event.type, event.code); | ||
| if(event.code == 0x73 && event.value == 0x1) | ||
| { | ||
| INFO("Vol_Up Button pressed!"); | ||
| char* thingID = (char*) data; | ||
| sprintf(payload, "{\n\"timestamp\": %lu, \"volume\": \"%s\" \n}\n", GetTimeSinceEpoch(), "increase"); | ||
| printf("%s", payload); | ||
| /**/ | ||
| char topic[512]; | ||
| sprintf(topic, vol_button_topic, thingID); | ||
| rc = MQTT_Send_Message(topic, payload, strlen(payload)); | ||
| if (NONE_ERROR != rc) | ||
| ERROR("Could not publish event: "); | ||
| } | ||
| return 1; //indicate event handled | ||
| } | ||
| /******************************************************************************* | ||
| * | ||
| * | ||
| ********************************************************************************/ | ||
| gboolean On_VolDown_ButtonPress(GIOChannel *source, GIOCondition condition, gpointer data) | ||
| { | ||
| IoT_Error_t rc = NONE_ERROR; | ||
| GError *error=0; | ||
| char buf[10]; | ||
| char payload[MAX_PAYLOAD]; | ||
| struct input_event event; | ||
| gsize bytes_read; | ||
| //read and clear the event | ||
| g_io_channel_seek_position(source, 0, G_SEEK_SET, 0); | ||
| g_io_channel_read_chars(source, (gchar*) &event, sizeof(event), &bytes_read, NULL); | ||
| // if(bytes_read >0) | ||
| // printf("Event0: keypress value=%x, type=%x, code=%x\n", event.value, event.type, event.code); | ||
| if(event.code == 0x72 && event.value == 0x1) | ||
| { | ||
| INFO("Vol_Down Button pressed!"); | ||
| char* thingID = (char*) data; | ||
| sprintf(payload, "{\n\"timestamp\": %lu, \"volume\": \"%s\" \n}\n", GetTimeSinceEpoch(), "decrease"); | ||
| printf("%s", payload); | ||
| /**/ | ||
| char topic[512]; | ||
| sprintf(topic, vol_button_topic, thingID); | ||
| rc = MQTT_Send_Message(topic, payload, strlen(payload)); | ||
| if (NONE_ERROR != rc) | ||
| ERROR("Could not publish event: "); | ||
| } | ||
| return 1; //indicate event handled | ||
| } | ||
| int MSG_GetDesiredState( int payload_len, char * payload, bool *des_state) | ||
| { | ||
| int ret = 0; | ||
| cJSON *root =cJSON_Parse(payload); | ||
| if(!root) { | ||
| ret = -1; | ||
| goto JSON_CLEAN; | ||
| } | ||
| //Get the desired state | ||
| cJSON *state = cJSON_GetObjectItem(root, "state"); | ||
| if(!state){ | ||
| ret = -1; | ||
| goto JSON_CLEAN; | ||
| } | ||
| *des_state = (bool) cJSON_GetObjectItem(state, "active")->valueint; | ||
| ret = 0; //seems like we succeeded | ||
| JSON_CLEAN: | ||
| if(root) | ||
| cJSON_Delete(root); | ||
| return ret; | ||
| } | ||
| int MSG_SetReportedState( int payload_len, char * payload, bool rep_state) | ||
| { | ||
| //Publish the new state | ||
| cJSON *root, *state, *reported_state; | ||
| root = cJSON_CreateObject(); | ||
| cJSON_AddItemToObject(root, "state", state = cJSON_CreateObject() ); | ||
| cJSON_AddItemToObject(state, "reported", reported_state = cJSON_CreateObject() ); | ||
| if (rep_state) | ||
| cJSON_AddTrueToObject(reported_state, "active"); | ||
| else | ||
| cJSON_AddFalseToObject(reported_state, "active"); | ||
| snprintf( payload, payload_len, "%s", cJSON_Print(root) ); | ||
| JSON_CLEAN: | ||
| if(root) | ||
| cJSON_Delete(root); | ||
| return 0; | ||
| } |
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |

 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

