
板子上通过I2C总线与zynq相连的是三片1848
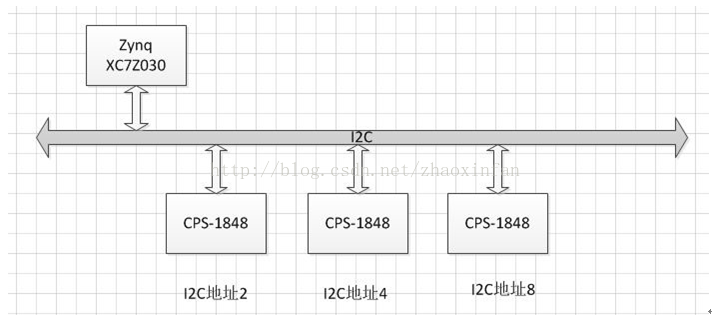 如上图所示,zynq通过I2C总线与3片CPS-1848交换芯片相连,3片1848芯片的I2C地址分别为2,4,8.
目前zynq上Linux I2C驱动采用的是i2c-cadence(drivers/i2c/buses),对应于i2c驱动中的bus driver(总线驱动,也称为适配器驱动)。需要实现的是i2c驱动中的设备驱动,类似于eeprom驱动(drivers/misc/eeprom)。
2、devicetree配置
如上图所示,zynq通过I2C总线与3片CPS-1848交换芯片相连,3片1848芯片的I2C地址分别为2,4,8.
目前zynq上Linux I2C驱动采用的是i2c-cadence(drivers/i2c/buses),对应于i2c驱动中的bus driver(总线驱动,也称为适配器驱动)。需要实现的是i2c驱动中的设备驱动,类似于eeprom驱动(drivers/misc/eeprom)。
2、devicetree配置706的devicetree中关于I2C的部分如下:
i2c@e0004000 {
compatible = "cdns,i2c-r1p10";
status = "okay";
clocks = <0x1 0x26>;
interrupt-parent = <0x3>;
interrupts = <0x0 0x19 0x4>;
reg = <0xe0004000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
clock-frequency = <0x61a80>;
pinctrl-names = "default";
pinctrl-0 = <0xb>; i2cswitch@74 {
compatible = "nxp,pca9548";
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x74>; i2c@0 {
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x0>; clock-generator@5d {
#clock-cells = <0x0>;
compatible = "silabs,si570";
temperature-stability = <0x32>;
reg = <0x5d>;
factory-fout = <0x9502f90>;
clock-frequency = <0x8d9ee20>;
};
}; i2c@1 {
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x1>; hdmi-tx@39 {
compatible = "adi,adv7511";
reg = <0x39>;
adi,input-depth = <0x8>;
adi,input-colorspace = "yuv422";
adi,input-clock = "1x";
adi,input-style = <0x3>;
adi,input-justification = "evenly";
};
}; i2c@2 {
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x2>; eeprom@54 {
compatible = "at,24c08";
reg = <0x54>;
};
}; i2c@3 {
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x3>; gpio@21 {
compatible = "ti,tca6416";
reg = <0x21>;
gpio-controller;
#gpio-cells = <0x2>;
};
}; i2c@4 {
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x4>; rtc@51 {
compatible = "nxp,pcf8563";
reg = <0x51>;
};
}; i2c@7 {
#address-cells = <0x1>;
#size-cells = <0x0>;
reg = <0x7>; ucd90120@65 {
compatible = "ti,ucd90120";
reg = <0x65>;
};
};
};
}; 参考706中的devicetree,通过i2c控制三片1848, devicetree格式修改如下:
i2c@e0004000 {
compatible = "cdns,i2c-r1p10";
status = "okay";
clocks = <0x1 0x26>;
interrupt-parent = <0x3>;
interrupts = <0x0 0x19 0x4>;
reg = <0xe0004000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
clock-frequency = <0x61a80>; cps1848@2 {
compatible = "cps1848";
reg = <0x2>;
}; cps1848@4 {
compatible = "cps1848";
reg = <0x4>;
}; cps1848@8 {
compatible = "cps1848";
reg = <0x8>;
};
}; 如上就配置好了三个地址分别为2,4,8的设备,暂时给它们起名叫cps1848. 3、 kernel配置
kernel中xilinx已经实现了i2c的bus driver,我们只需要实现device driver。由于eeprom为标准i2c设备,可以将eeprom为模板实现1848的设备驱动。修改过程中注意匹配设备的name和驱动id_table中的name,设备name就是devicetree中的cps1848. 实现后的cps1848代码如下:
/*
* CPS1848 bus driver
*
* Copyright (C) 2014 CGT Corp.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; version 2 of the License.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
*/ #define DEBUG #include
#include
#include
#include
#include
#include #include /* Each client has this additional data */
#define USER_EEPROM_SIZE 0xFFFF48
#define USER_XFER_MAX_COUNT 0x8 /* Addresses to scan */
static const unsigned short cps1848_i2c[] = { 0x3, I2C_CLIENT_END }; static unsigned read_timeout = 25;
module_param(read_timeout, uint, 0);
MODULE_PARM_DESC(read_timeout, "Time (in ms) to try reads (default 25)"); static unsigned write_timeout = 25;
module_param(write_timeout, uint, 0);
MODULE_PARM_DESC(write_timeout, "Time (in ms) to try writes (default 25)"); struct cps1848_data {
struct mutex lock;
u8 *data;
}; static ssize_t cps1848_eeprom_read( struct i2c_client *client,
char *buf, unsigned offset, size_t count)
{
struct i2c_msg msg[2];
u8 msgbuf[4];
unsigned long timeout, transfer_time;
int status; memset(msg, 0, sizeof(msg)); msgbuf[0] = (u8)((offset >> 18) & 0x3f);
msgbuf[1] = (u8)((offset >> 10) & 0xff);
msgbuf[2] = (u8)((offset >> 2) & 0xff); msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = 3; msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].buf = buf;
msg[1].len = count; /*
* Reads fail if the previous write didn't complete yet. We may
* loop a few times until this one succeeds, waiting at least
* long enough for one entire page write to work.
*/
timeout = jiffies + msecs_to_jiffies(read_timeout);
do {
transfer_time = jiffies; status = i2c_transfer(client->adapter, msg, 2);
if (status == 2)
status = count; dev_dbg(&client->dev, "read %ld@0x%lx --> %d (%ld)\n",
count, (unsigned long)offset, status, jiffies); if (status == count)
return count; /* REVISIT: at HZ=100, this is sloooow */
msleep(1);
} while (time_before(transfer_time, timeout)); return -ETIMEDOUT; } static ssize_t cps1848_read(struct file *filp, struct kobject *kobj,
struct bin_attribute *bin_attr,
char *buf, loff_t offset, size_t count)
{
struct i2c_client *client = kobj_to_i2c_client(kobj);
struct cps1848_data *data = i2c_get_clientdata(client); ssize_t retval = 0; if (offset > USER_EEPROM_SIZE)
return 0; if (offset + count > USER_EEPROM_SIZE)
count = USER_EEPROM_SIZE - offset; mutex_lock(&data->lock); dev_dbg(&client->dev, "cps1848 start read %ld@0x%lx ..\n", count, (unsigned long)offset); while (count > 0) {
ssize_t status = count>USER_XFER_MAX_COUNT?USER_XFER_MAX_COUNT:count;
status = cps1848_eeprom_read(client, buf, offset, status);
if (status <= 0) {
if (retval == 0)
retval = status;
break;
}
buf += status;
offset += status;
count -= status;
retval += status;
} dev_dbg(&client->dev, "cps1848 end read %ld@0x%lx !\n", retval, (unsigned long)offset); mutex_unlock(&data->lock); return retval; } static ssize_t cps1848_eeprom_write(
struct i2c_client *client,
struct cps1848_data *data,
char *buf, unsigned offset, size_t count)
{
struct i2c_msg msg[1];
u8 *msgbuf;
unsigned long timeout, transfer_time;
int status; memset(msg, 0, sizeof(msg)); msgbuf = data->data; msgbuf[0] = (u8)((offset >> 18) & 0x3f);
msgbuf[1] = (u8)((offset >> 10) & 0xff);
msgbuf[2] = (u8)((offset >> 2) & 0xff);
memcpy(msgbuf+3, buf, count); msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = 3 + count; /*
* Reads fail if the previous write didn't complete yet. We may
* loop a few times until this one succeeds, waiting at least
* long enough for one entire page write to work.
*/
timeout = jiffies + msecs_to_jiffies(write_timeout);
do {
transfer_time = jiffies; status = i2c_transfer(client->adapter, msg, 1);
if (status == 1)
status = count; dev_dbg(&client->dev, "write %ld@0x%lx --> %d (%ld)\n",
count, (unsigned long)offset, status, jiffies); if (status == count)
return count; /* REVISIT: at HZ=100, this is sloooow */
msleep(1);
} while (time_before(transfer_time, timeout)); return -ETIMEDOUT;
} static ssize_t cps1848_write(struct file *filp, struct kobject *kobj,
struct bin_attribute *bin_attr,
char *buf, loff_t offset, size_t count)
{
struct i2c_client *client = kobj_to_i2c_client(kobj);
struct cps1848_data *data = i2c_get_clientdata(client); ssize_t retval = 0; if (offset > USER_EEPROM_SIZE)
return 0; if (offset + count > USER_EEPROM_SIZE)
count = USER_EEPROM_SIZE - offset; mutex_lock(&data->lock); dev_dbg(&client->dev, "cps1848 start write %ld@0x%lx ..\n", count, (unsigned long)offset); while (count > 0) {
ssize_t status = count>USER_XFER_MAX_COUNT?USER_XFER_MAX_COUNT:count;
status = cps1848_eeprom_write(client, data, buf, offset, status);
if (status <= 0) {
if (retval == 0)
retval = status;
break;
}
buf += status;
offset += status;
count -= status;
retval += status;
} dev_dbg(&client->dev, "cps1848 end write %ld@0x%lx !\n", retval, (unsigned long)offset); mutex_unlock(&data->lock); return retval; } static struct bin_attribute user_eeprom_attr = {
.attr = {
.name = "eeprom",
.mode = (S_IRUSR | S_IWUSR),
},
.size = USER_EEPROM_SIZE,
.read = cps1848_read,
.write = cps1848_write,
}; /* Return 0 if detection is successful, -ENODEV otherwise */
static int cps1848_detect(struct i2c_client *client, struct i2c_board_info *info)
{
struct i2c_adapter *adapter = client->adapter; if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE_DATA)) {
dev_dbg(&client->dev, "cps1848 detect error for BYTE access !\n");
return -ENODEV;
} strlcpy(info->type, "eeprom", I2C_NAME_SIZE); return 0;
} static int cps1848_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct i2c_adapter *adapter = client->adapter;
struct cps1848_data *data;
int err ; dev_notice(&client->dev, "CPS1848 driver: " __DATE__ " " __TIME__ " \n" ); if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE_DATA)) {
dev_err(&client->dev, "CPS1848 driver: BYTE DATA not supported! \n" );
return -ENODEV;
} if (!(data = kzalloc(sizeof(struct cps1848_data), GFP_KERNEL))) {
dev_err(&client->dev, "CPS1848 driver: Memory alloc error ! \n" );
return -ENOMEM;
} /* alloc buffer */
data->data = devm_kzalloc(&client->dev, USER_XFER_MAX_COUNT + 8, GFP_KERNEL);
if (!data->data) {
dev_err(&client->dev, "CPS1848 driver: Memory alloc error ! \n" );
err = -ENOMEM;
goto exit_kfree;
} /* Init real i2c_client */
i2c_set_clientdata(client, data);
mutex_init(&data->lock); err = sysfs_create_bin_file(&client->dev.kobj, &user_eeprom_attr);
if (err) {
dev_err(&client->dev, "CPS1848 driver: sysfs create error ! \n" );
goto exit_kfree;
} return 0; exit_kfree:
if(data->data)
kfree(data->data);
kfree(data);
return err;
} static int cps1848_remove(struct i2c_client *client)
{
struct cps1848_data *data = i2c_get_clientdata(client); sysfs_remove_bin_file(&client->dev.kobj, &user_eeprom_attr);
if(data->data)
kfree(data->data);
kfree(data); return 0;
} static const struct i2c_device_id cps1848_id[] = {
{ "cps1848", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, cps1848_id); static struct i2c_driver cps1848_driver = {
.driver = {
.name = "cps1848",
},
.probe = cps1848_probe,
.remove = cps1848_remove,
.id_table = cps1848_id, .class = I2C_CLASS_SPD,
.detect = cps1848_detect,
.address_list = cps1848_i2c,
}; module_i2c_driver(cps1848_driver); MODULE_AUTHOR("RobinLee");
MODULE_DESCRIPTION("CPS1848 driver");
MODULE_LICENSE("GPL"); 将该代码命名为i2c-1848放在drivers/i2c/muxes下
 修改muxes的Kconfig文件以及Makefile文件,加入针对1848的配置选项
修改muxes的Kconfig文件以及Makefile文件,加入针对1848的配置选项
 在编译内核菜单中能看到新增加配置选项
在编译内核菜单中能看到新增加配置选项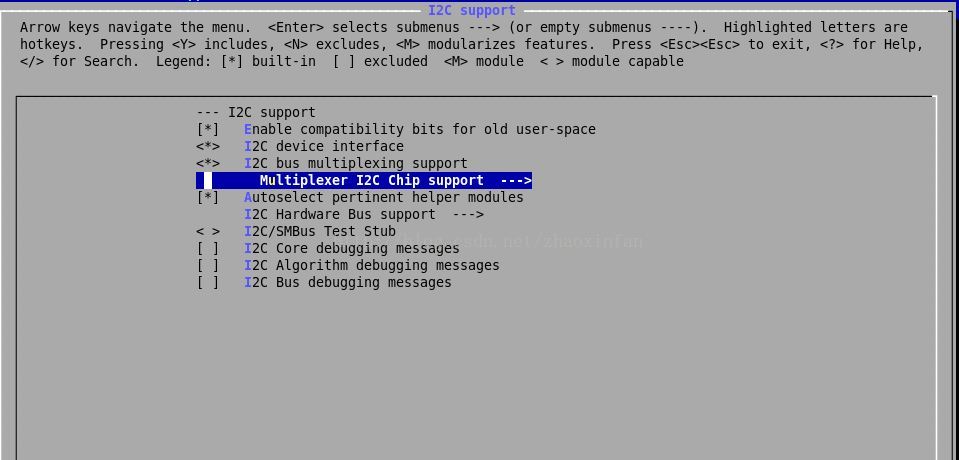
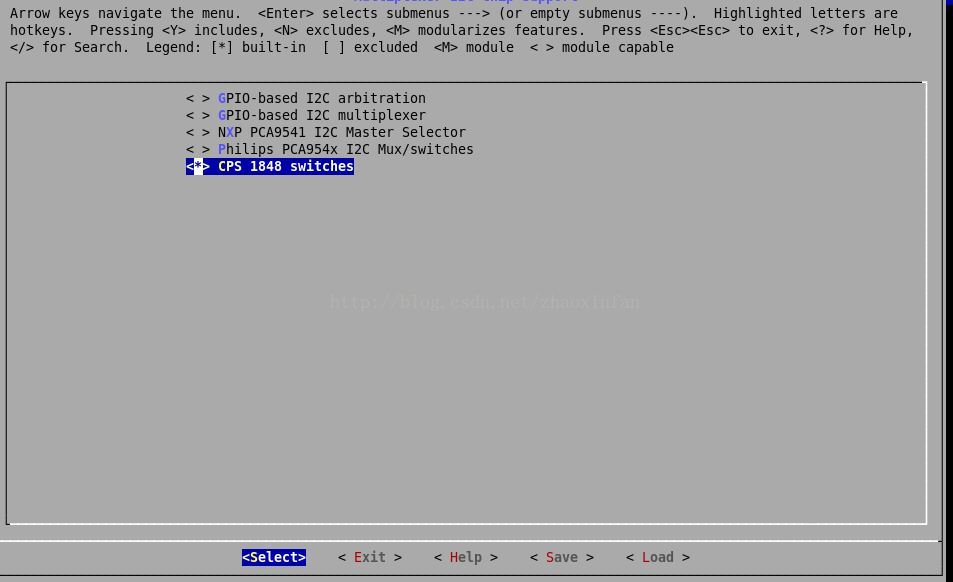 选择以后进行编译,这样kernel配置就完成了。
4、 i2c驱动测试
选择以后进行编译,这样kernel配置就完成了。
4、 i2c驱动测试系统上电启动,加载devicetree,kernel,uramdisk,能看到kernel启动时已经加载了cps1848驱动。
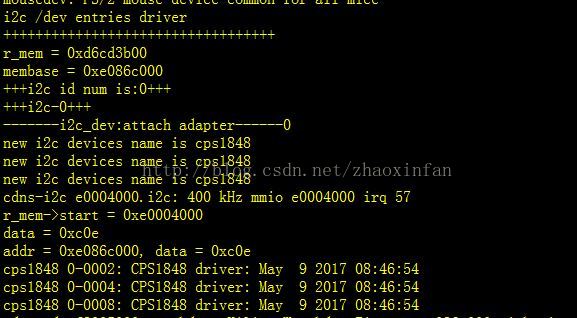 上图中列出了系统检测到的三个i2c设备,名称为cps1848,地址为0002,0004,0008.
为了针对cps1848进行测试,首先要知道三片1848在系统中的位置(在linux中所有设备都是以文件形式挂载)。最终在sys/class/i2c-dev/i2c-0/device下找到了三个设备。
上图中列出了系统检测到的三个i2c设备,名称为cps1848,地址为0002,0004,0008.
为了针对cps1848进行测试,首先要知道三片1848在系统中的位置(在linux中所有设备都是以文件形式挂载)。最终在sys/class/i2c-dev/i2c-0/device下找到了三个设备。 根据该设备修改测试程序(app-cps1848.tar.gz 下载地址见:http://download.csdn.net/detail/jj12345jj198999/9837954 )中的文件位置
app-cps1848/cps1848/app/cps1848.c
根据该设备修改测试程序(app-cps1848.tar.gz 下载地址见:http://download.csdn.net/detail/jj12345jj198999/9837954 )中的文件位置
app-cps1848/cps1848/app/cps1848.c 编译测试程,得到cps1848可执行文件
编译测试程,得到cps1848可执行文件
 将cps1848放进uramdisk中,参考:rootfs修改
将cps1848放进uramdisk中,参考:rootfs修改
产生新的uramdisk.image.gz,重新加载linux 在/usr/sbin下运行cps1848,进入cps1848控制界面
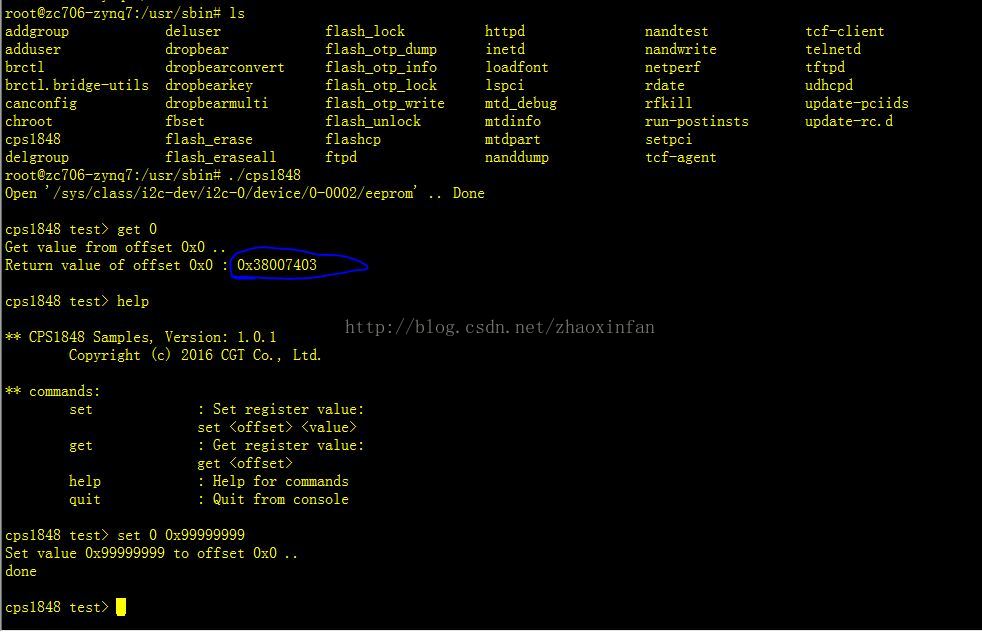 输入get 0,获取1848地址为0寄存器的值,该值为0x38007403
查看cps1848的datasheet,发现值确实是这个,大小端颠倒一下。
输入get 0,获取1848地址为0寄存器的值,该值为0x38007403
查看cps1848的datasheet,发现值确实是这个,大小端颠倒一下。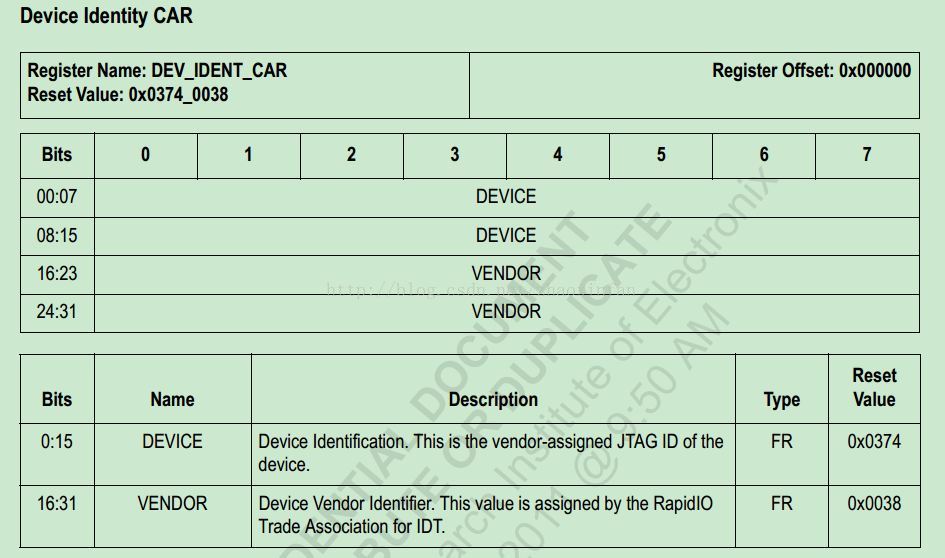 重复上述测试过程,再测试0002和0004位置的1848,最终实现对1848驱动的测试。
重复上述测试过程,再测试0002和0004位置的1848,最终实现对1848驱动的测试。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

