
内核驱动不仅可以将驱动编译到内核中,还可以动态的编译内核驱动。本文档介绍如何以模块的方式编译内核驱动。
要动态的编译内核,首先需要将内核源码编译通过,内核的编译请参考使用手册第五章。
1.4418 内核编译器的查询和环境变量设置
在开发中,大家会遇到源码和编译器集成到一起的情况。迅为的 4418 源码和 arm 编译器就是集成到一起的,本节主要介绍如何找到编译器路径和配置环境变量。
进入 android 源码目录(这个目录是作者的,用户如果解压目录不一样,请注意后面的Makefile 文件以及环境变量参数也要修改)。
如下图所示,使用命令“cd kernel”。
使用命令“cp -r config_for_iTOP4418_android_RTL8211 .config”配置内核缺省文件,然后使用命令“export ARCH=arm”将平台设置为 ARM。
最后使用命令“make menuconfig”。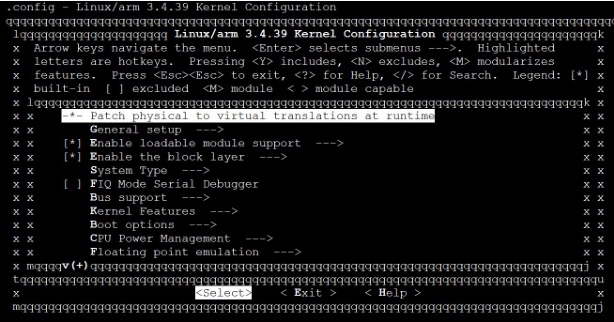
如下图所示,内核配置界面。
进入“ General setup ---> ”,如下图所示。下图红色方框中的“arm-eabi-”就是我们需要的信息,内核使用的编译器是“arm-eabi-”。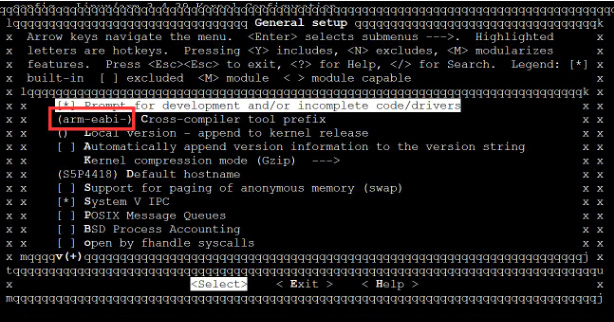
退出 menuconfig 界面,使用命令“cd ../”返回到 android 目录下,接着使用命令“find ./ -name *arm-eabi-*”查找源码中自带的编译器在那个目录下。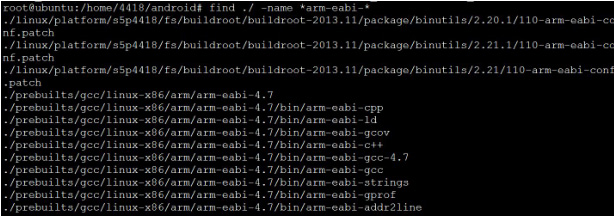
如上图所示,我们找到内核使用的编译器在“prebuilts/gcc/linux-x86/arm/arm-eabi-4.7/bin”目录下。大家可能很奇怪,为什么 arm 编译器要放到“prebuilts/gcc/linux-x86/”目录下,可能是三星工作人员懒得再建文件夹了吧。另外有 4.6 和 4.7 两个版本,我们
直接用高版本就成。
那么编译器完整的路径为“/home/4418/android/prebuilts/gcc/linux-x86/arm/arm-eabi-4.7/bin/”。
使用命令“cd”命令,接着使用命令“vim .bashrc”打开环境变量文件,如下图所示。
在接着按键 Shift+g,进入环境变量文本的最底行,如下图所示。
如下所示,作者以前的编译器使用的是 arm-2009,作者这里需要注释掉。用户如果前没有设置过,则这一步可以忽略。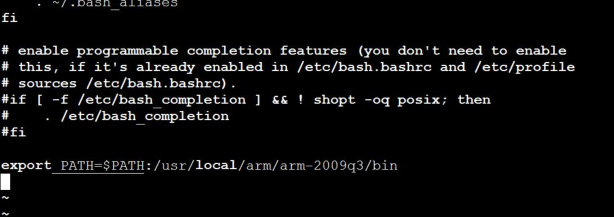
接着添加 4418 的编译器环境变量,export PATH=$PATH:/home/4418/android/prebuilts/gcc/linux-x86/arm/arm-eabi-4.7/bin/
如下图所示。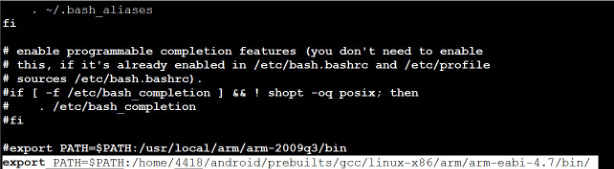
保存退出,使用命令“source .bashrc”更新环境变量。控制台输入“arm”,然后按Tab 键,如下图所示。如果不出现如下界面或者仍然出现原来的编译器,可以关掉这个控制台,再开一下。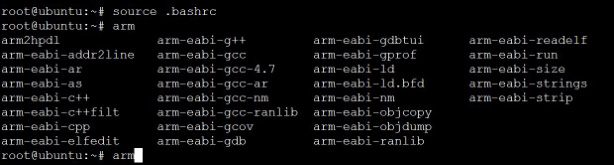
到这一步编译器和环境变量就介绍完了。
2 Makefile 和测试驱动源码以及编译
2.1Makefile
Makefile 脚本文件:
export ARCH=arm
obj-m += iTOP4418_driver_hello.o
KDIR := /home/4418/android/kernel
PWD = $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules
clean:
rm -rf *.o
脚本中,export ARCH=arm 表示设置目标 CPU 类别为 arm,也就是编译的依赖内核和驱动模块目标 CPU 为 ARM。
obj-m += iTOP4418_driver_hello.o 表示编译的源文件为 iTOP4418_driver_hello.c,
如果源文件名有变化,则需要修改成对应的。
KDIR 参数指向对应的内核源码目录。作者的内核源码是在
/home/4418/android/kernel 目录下,用户要根据自己的具体情况来修改。
2.2 简单驱动源码
驱动文件名称为:iTOP4418_driver_hello.c,源码如下:
#include
#include
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("iTOPEET_dz");
static int hello_init(void)
{
printk(KERN_EMERG "Hello World enter!\n");
return 0;
}
static void hello_exit(void)
{
printk(KERN_EMERG "Hello world exit!\n");
}
module_init(hello_init);
module_exit(hello_exit);
驱动源码只有基本的入口和出口函数。加载和卸载的时候分别打印“Hello Worldenter!”和“Hello world exit!”。
2.3 编译
如下图所示,将源码拷贝到 Ubuntu 系统下。
使用命令“make”,如下图所示,可以看到有“iTOP4418_driver_hello.ko”文件生成。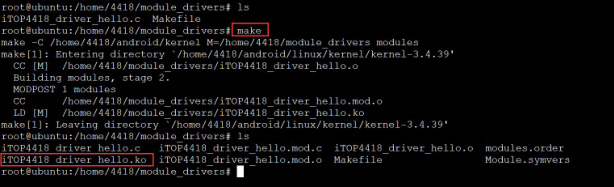
3 常见问题
在以模块的方式编译驱动的过程中,新手可能会以下问题。
1.内核源码没有编译或者内核源码路径设置不正确。
如果内核源码没有编译,那么模块将会提示缺少库之类的错误;如果路径设置不正确,会提示找不到内核。
2.编译器未设置正确。
会提示找不到 arm-gcc 库之类的错误,请仔细检查编译器路径,确定在控制台输入arm+Tab 之后可以出现 arm-eabi 编译器。
另外部分用户可能尝试使用其它的编译器,例如 arm-2009q3,之类的,理论上很多编译器也是可以编译通过,但是不建议这么做,驱动最好和内核使用同一个编译器。
3.源码和 Makefile 文件在 Windows 下编写,然后拷贝到 Ubuntu 上,由于编辑器不同导致转码错误。
这种错误比较容易解决,Make 编译之后,系统会提示 Makefile 或者驱动文件具体某一行出现问题。使用 vim 编辑器打开查看一下,就能找出一些乱码,使用 vim 编辑器修正一下再编译即可。
共2条
1/1 1 跳转至页
迅为4418开发板-驱动-以模块的方式编译内核驱动
共2条
1/1 1 跳转至页
回复
| 有奖活动 | |
|---|---|
| 硬核工程师专属补给计划——填盲盒 | |
| “我踩过的那些坑”主题活动——第002期 | |
| 【EEPW电子工程师创研计划】技术变现通道已开启~ | |
| 发原创文章 【每月瓜分千元赏金 凭实力攒钱买好礼~】 | |
| 【EEPW在线】E起听工程师的声音! | |
| 高校联络员开始招募啦!有惊喜!! | |
| 【工程师专属福利】每天30秒,积分轻松拿!EEPW宠粉打卡计划启动! | |
| 送您一块开发板,2025年“我要开发板活动”又开始了! | |
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| Chaos-nano:专为低资源单片机设计的轻量级协作式异步操作系统(ATMEGA328P轻量级操作系统)—— 详细介绍被打赏¥16元 | |
| FPGA配置被打赏¥10元 | |
| Chaos-nano协作式异步操作系统:赋能MicrochipAVR8位单片机的革新之路被打赏¥15元 | |
| 基于esp32开发时串口工具的注意点被打赏¥24元 | |
| 基于FireBeetle2ESP32-C5开发板的舵机控制被打赏¥20元 | |
| 【分享开发笔记,赚取电动螺丝刀】MAX78000开发板制作的电子相册被打赏¥32元 | |
| 基于FireBeetle2ESP32-C5开发板的超声波测距及显示被打赏¥21元 | |
| FireBeetle2ESP32-C5上RTC电子时钟的实现被打赏¥25元 | |
| 【分享开发笔记,赚取电动螺丝刀】MAX78000开发板读取SD卡被打赏¥23元 | |
| 【S32K3XX】Standby RAM 重启后数据异常问题调查被打赏¥38元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

