
PID控制系统
连续一时间PID控制系统如图所示。
D(s)为控制器。在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。
PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数e(t)=r(t)-y(t)。
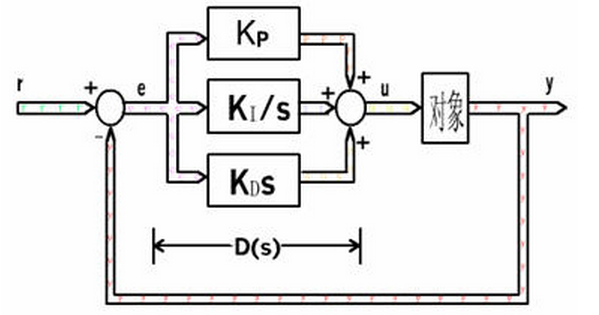
图中的比例,积分,微分的线性组合,构成控制量u(t)称为
比例(Proportional),积分(Integrating),微分(Differentiation)控制,简称PID控制。
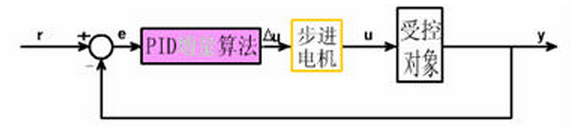
增量算法
当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的“增量算法”。
比例,积分,微分
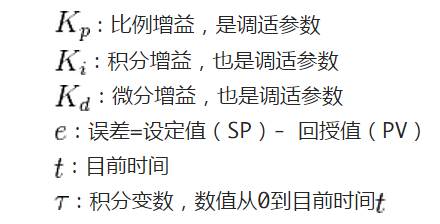
我们先来了解下正式的定义,P,I,D分别代表控制算法中的三个组成部分:比例,积分,微分。
比例
阀门驱动的准则之一是比例偏差,指的是系统读数与设定值间的差异,该偏差乘以P值后的数值被赋予求和地址位。
积分
由微积分曲线图可知,积分是某两点区间内曲线下方包围的面积,通常即起始时间点与结束时间点。
说得更实际点,就是从零点开始的读数总和或误差总和。调节P值和D值仅着力于当下或前一刻的测量状态,I值则利用更多较早的数据将当前系统读数修正至设定值。
微分
根据微积分函数表达式y=T(dx/dt),微分是变量(x)对时间(t)的求导。
PID控制算法会将求和地址位数值,减去dx/dt乘以D值后的值,作为阻尼项。
PID是以它的三种纠正算法而命名。
受控变数是三种算法(比例、积分、微分)相加后的结果,即为其输出,其输入为误差值(设定值减去测量值后的结果)或是由误差值衍生的信号。
若定义 u(t) 为控制输出,PID算法可以用下式表示:

简而言之,P就是把我们所要到达的目标距离分成n份,但是这只会是我们无限的接近目标值而不会达到目标值。I可以补足P所不足的部分,一般情况下我们只需要调整PI即可,但是PI不够稳定,可能会出现超调现象,这对我们机器的运行是很不利的。而D可以解决这一问题,当PI值过大的时候D可以起到限制作用。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

