
这篇文章来源于DevicePlus.com英语网站的翻译稿。
今天,我们将利用一些现成的组件组装一台能够拍摄高质量航拍照片以及稳定高清视频的四轴飞行器。该飞行器还会配备多种安全功能,所以新手也可以自信地操作该四轴飞行器。四轴飞行器的实时视频流通过Wifi从Raspberry Pi传输到移动设备上。该无人机还搭载了一个Linux计算机,这会为您带来许多创造性——额外的传感器、计算机视觉等。
在本系列的第一部分中,我们首先介绍四轴飞行器的硬件——需要哪些部件,它们有什么作用,如何组装在一起。在本系列的第二部分和第三部分中,我们将介绍四轴飞行器的软件——故障保护功能、遥控和飞行模式。
硬件:DJI F450 ARF (几乎到手即飞) 套件
3300mAh 3S 35C LiPo 电池(附带T型接头)
EV-Peak – AP606 – 50W DC LiPo 电池充电器/放电器 (大多数LiPo充电器都适用)
RadioLink AT9 2.4GHz 9CH ****,R9D 9CH 接收器
Xiaomi Yi 运动相机(附带microSD卡)
FeiYu Tech Mini 3D 3轴无刷万向节
Raspberry Pi (Model A+), microSD 卡
Raspberry Pi 相机模块
任意支持 802.11a/n/ac (5GHz 频段)的USB无线网卡——本项目用的是 D-Link DWA-160
备用 micro USB cable
各种公母T型接头
RadioLink AT9 2.4GHz 9CH ****,R9D 9CH接收器
吸盘式车载手机支架
4 个M3螺栓,8个M3螺母
安卓手机
工具:
电烙铁
焊锡
内六角扳手
热熔胶枪
热熔胶棒
启动该项目之前,我们必须了解四轴飞行器各个部分的作用。下文列出了构建该四轴飞行器所需的零部件及其用途,以及本教程中所使用的每个零部件的具体型号。
机架:
作用:该机架为安装电机和电子设备提供了一个简易环境
本项目所使用的部件: DJI Flame Wheel 450 (F450) 机架(包含在ARF套件中)
无刷电机和螺旋桨:
作用:电机带动螺旋桨旋转产生推力,以抬升四轴飞行器
本项目所使用的部件: DJI E305 960KV 电机和DJI 9450螺旋桨(两者均包含在ARF套件中)
电子调速器 (ESC):
作用:ESC为无刷电机供电,并提供PWM接口,以允许飞行控制器控制每一个电机的速度和推力
本项目所使用的部件: DJI E305 960KV 电机(包含在ARF套件中)
飞行控制器:
作用:顾名思义,飞行控制器负责控制四轴飞行器如何飞行。飞行控制器其实是一台小型计算机,配备了惯性测量装置(IMU,包含陀螺仪和加速度计),目的是保持四轴飞行器稳定。飞行控制器还搭载了气压计、GPS和磁力计,以便让飞行控制器分别知道它目前的高度,所处的地区,面朝的方位。
本项目所使用的部件: NAZA-M Lite,附带GPS套件(包含在ARF套件中)
稳压器、飞行控制器状态LED/USB接口:
作用:稳压器旨在为飞行控制器提供5V恒压。状态LED负责在飞行过程中将四轴飞行器的状态信息传递给操纵人员。状态LED灯包括电池电量低指示和GPS锁定指示。USB接口则允许我们在电脑上配置飞行控制器(我们将会在第2部分用到)。
本项目所使用的部件: 稳压器和状态LED灯包含在NAZA-M Lite中
电池:
作用:锂聚合物(LiPo)电池具有较高的能量重量比以及较大的最大放电电流,因此是为四轴飞行器提供动能的首选方式。在将LiPo电池装上四轴飞行器之前,了解如何安全地使用和充电是非常重要的。否则,可能会引起火灾及爆炸。有一些电池规格需要了解,它们的定义如下:
本项目所使用的部件:本项目使用的电池为ReadyMadeRC 3300mAh 3S 35C LiPo电池(附带T型接头)。
容量:电池以特定电流放电,“耗尽”之前能够持续的放电时间。比如,如果一个电池的容量是1200mAh(毫安小时),然后连续向外界提供一个1000mA的电流,那么在1200mAh/1000mA = 1.2小时后,该电池耗尽。通常,电池寿命=容量(mAh)/电流(mA)。但我们建议在LiPo电池剩余电量在20%时就对其进行充电。
电池芯数量:每个LiPo电池由1个或多个电池芯组成。一个电池内的电池芯串联连接,因此电池的总电压即为各个电池芯电压的总和。LiPo电池的电池芯数量通常为电池上字母“S”之前的数字——2S表示电池是两芯电池。
放电率:放电率反映了电池的最大安全放电电流。LiPo电池的放电率通常为电池上字母“C”之前的数字——标记为35C的电池可提供的最大电流为“35x容量”。
LiPo 电池充电器:
作用:LiPo电池充电器负责对LiPo电池进行安全充电。请注意,必须用LiPo电池充电器充电,而不能用其他充电器(例如镍镉电池或者镍氢电池充电器)。
本项目所使用的部件:EV-Peak–AP606–50W DC充电器/放电器
****+接收器:
作用:****通过多个操纵杆和开关接收操作人员指令,然后通过Wifi发送到四轴飞行器的接收器上。接收器负责解码操作人员的命令,然后将其转发给飞行控制器。
本项目所使用的部件: RadioLink AT9 2.4GHz 9CH****,R9D 9CH接收器
万向节+相机
作用:有了相机和万向节,四轴飞行器就能变成一个拍摄专业镜头的航拍平台。相机安装在万向节上,而万向节的动作实际上与四轴飞行器的相反——确保相机始终保持水平。
本项目所使用的部件: Xiaomi Yi 运动相机,FeiYu Tech Mini 3D 3轴无刷万向节
RPi,RPi相机,WiFi无线网卡:
作用:虽然安装在万向节上的相机能够以惊人的2K分辨率录制视频,但是,如果我们无法确定想要拍摄的物体是否位于镜头内,再好的摄像装备也没用。Raspberry Pi相机通过5GHz WiFi无线网卡连接到Raspberry Pi 3代A +。因此,Raspberry Pi可以将前向Raspberry Pi相机的实时视频流传输至通过WiFi连接的任何设备。
本项目所使用的部件:Raspberry Pi Model A+,Raspberry Pi相机模块,D-Link DWA-160。
安卓手机,手机支架:
作用:手机的作用是为Raspberry Pi提供Wi-Fi热点,并提供一个显示屏幕,方便我们查看无人机传输的实时视频流。手机支架负责将手机与****连在一起。
本项目所使用的部件:LG Nexus 5(任何支持移动热点的安卓手机都可以)。任意一端是吸盘、另一端是磁性部件的手机支架。
组装步骤:
第1步:将ESC焊接到底板上
我们使用的DJI F450机架包含一个顶板和一个底板,安装完成后,它们应该将四个机臂“夹在中间”。每个机臂的末端安装一个电机,机臂下方安装一个ESC。这两块板将四个机臂固定在一起,并为四轴飞行器上的所有组件提供了一个安装表面。
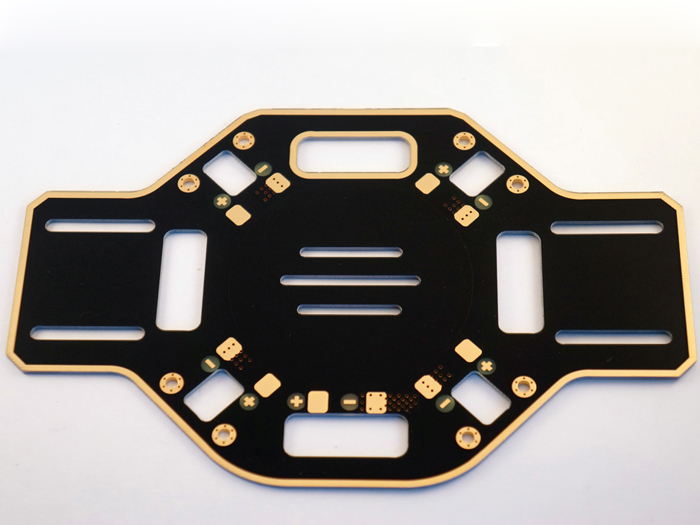
图1:DJI Flamewheel机架底板 /©QuadcopterGarage
底板有一个非常重要的功能:它将电池的能量分配给所有的ESC。如上图所示,底板上有五对正负极焊盘——每个ESC用一对,电池接头用一对。每个ESC(电子调速器)都有两条电缆:一根双线PWM信号线和一根较粗的黑色电源线。

图2:电子调速器(ESC)
目前我们只关注调速器的电源线,后面再将PWM信号线连接到飞行控制器。这根电源线太长,可以将其剪成约12厘米长。然后剥掉电源线上的一段黑色绝缘层,露出红色电线(正极)和裸线(负极)。将红线焊接到焊盘(+)上,将裸线焊接到焊盘(-)上。为了防止短路,我在焊盘上打了热熔胶。请为每个电机重复此过程。
第2步:将稳压器和电池导线焊到底板上
将ESC焊接到底板上之后,您会看到还剩下一对焊盘(图1底部的焊盘)。这对焊盘是用来连接电池导线和稳压器导线的(图3)。
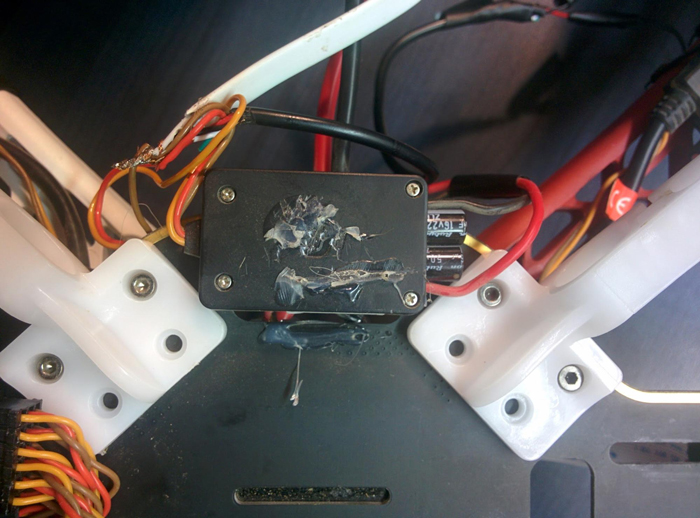
图3:两个白色支腿之间的黑色矩形稳压器
NAZA-M Lite盒中应包含两根大规格的导线——一根红色和一根黑色。将盒中的红色导线和稳压器的红色导线焊接到正极(+)焊盘上。将盒中的黑色导线和稳压器的黑色导线焊接到负极(-)焊盘上。为了防止短路,我在焊盘上打了热熔胶。
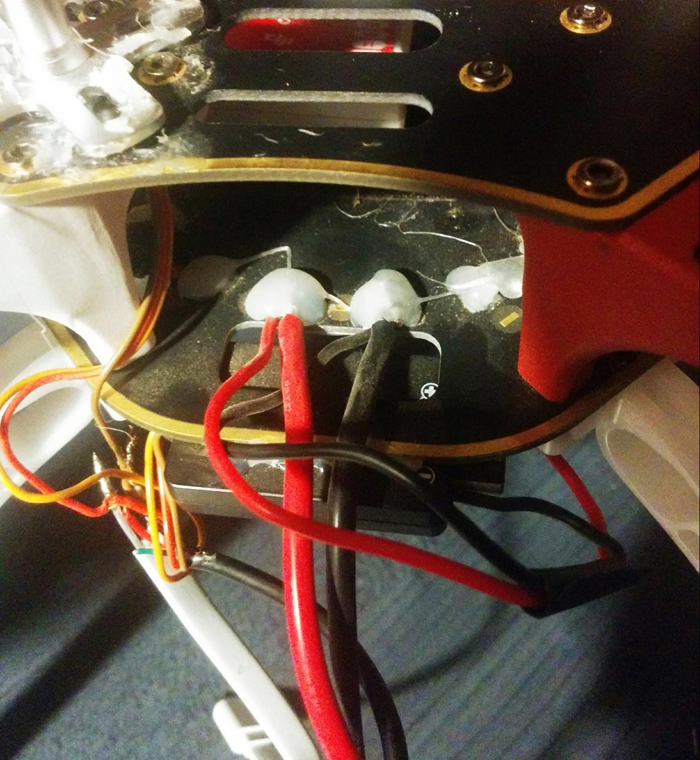
图4:焊接到配电板上的电池和稳压器导线
第3步:连接T型接头
我们不能直接将电池焊接到上述导线,因为那样的话我们将无法更换电池或为电池充电。要将电池连接至底板中的配电板,我们需要将一个公的T型接头焊接到我们刚刚焊接的那两根导线上。为此,将接头的短边朝上,将红色导线焊接到较短的水平部分,将黑色导线焊接到较短的垂直部分(有关极性,请参见下图右侧的接头)。
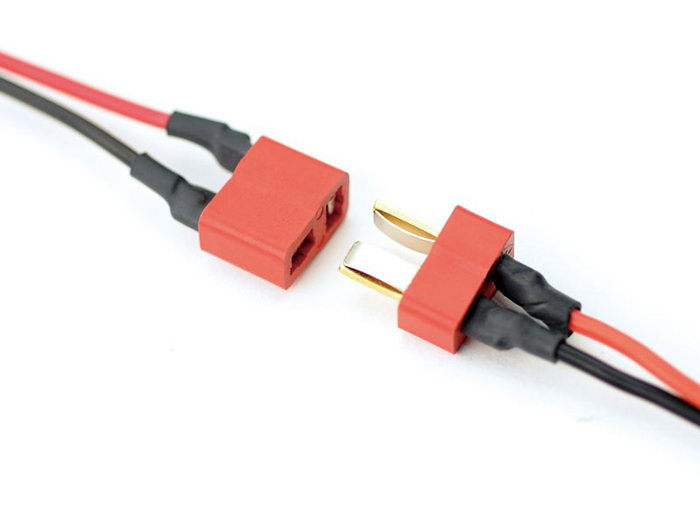
图5:T型接头的极性 / ©Ruberkon
完成焊接后,接头的样子如下所示(我用电工胶带包住了裸露的金属部分,当然您也可以用热缩管):
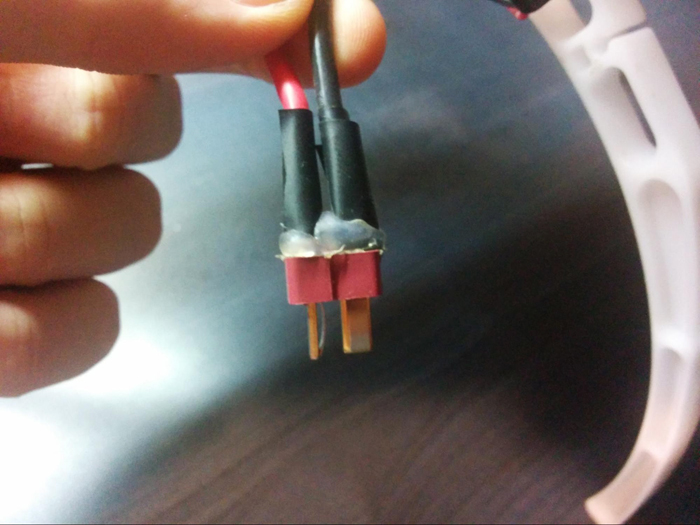
图6:连接电池的T型接头
第4步:安装飞行控制器

图7:NAZA-M Lite飞行控制器 / ©djicdn.com
将NAZA-M Lite附带的黑色双面胶切成与飞行控制器一样长。撕掉双面胶一面的保护膜,然后将其牢固地粘在底板的中间。然后,将飞行控制器标有M1、M2、M3等多个标签的一侧朝着底板上您认为是四轴飞行器正面的那一侧。撕下双面胶另一面的保护膜,将飞行控制器粘在上面。
第5步:安装RC接收器
我选择将RC接收器安装在机架背面底板底部延伸处,用热熔胶或者双面胶对其简单固定。从接收器伸出的那根导线是天线,暂时不用管它,等组装支腿的时候再考虑。
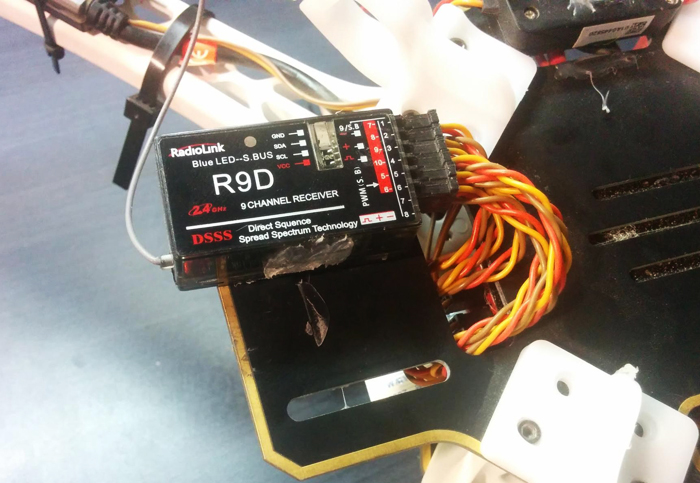
图8:位于机架背面下方的接收器
第6步:将接收器的伺服线连至飞行控制器
接收器上每三个一列的引脚会输出一个PWM信号。在RC领域,每个PWM信号都称为一个通道,代表操纵人员命令的一个组成部分。比如,接收器的通道3是操纵人员所需的加速信号。为了让飞行控制器能够接收操纵人员的每个命令,我们必须使用一根PWM信号线将接收器上的每个通道连接到飞行控制器。请注意,插入飞行控制器时,PWM信号线上的橙色(信号)导线应位于顶部,而棕色导线的另一端连接接收器时应朝下。
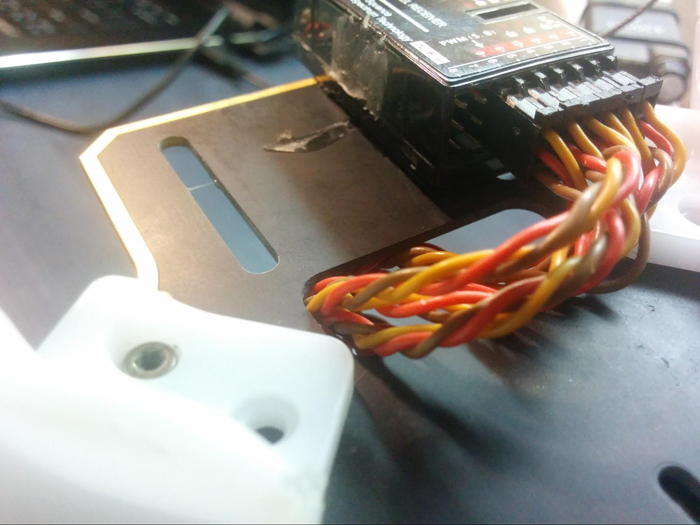
图9:连接接收器的PWM信号线请注意线缆的插入方式,橙色导线应位于顶部。
PWM信号线应按以下方式连接(左侧的通道编号在接收器上,右侧括号中的字母位于NAZA的背面):
通道 1 = 副翼 (A)
通道 2 = 升降副翼 (E)
通道 3 = 加速 (T)
通道 4 = 舵 (R)
通道 5 = 飞行模式 (U)
通道 6 = 方向锁定 (X2)
第7步:将ESC伺服线连至飞行控制器
还记得我前面提到的ESC的那根双线伺服电线吗?现在,我们将其连至飞行控制器。飞行器坠毁的一个常见原因就是ESC与飞行控制器的连接顺序按错误,因此我们必须在首次就正确安装该器件。
在NAZA-M Lite的正面,您会看到多列标有M1-M6的引脚,我们只需连接M1-M4。您必须根据下图将电机连至飞行控制器,其中红色机臂是四轴飞行器的前方。比如,右前ESC的伺服线必须连接到M1;左前ESC伺服线必须连接到M2,依此类推,按逆时针方向转。
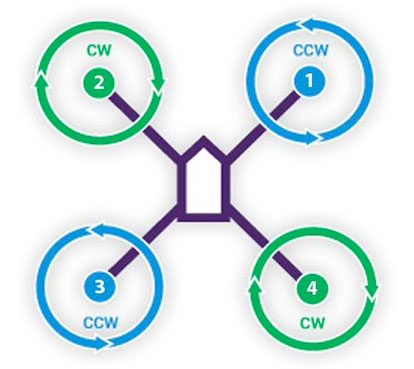
图10:NAZA的电机编号定义
第8步:将顶板安装到机臂上

图11:机架的侧视图
我们已经将所有电子设备都安装在底板上了,现在应先从顶板开始将顶板和底板与机臂固定在一起。您可能已经注意到,DJI F450机架包含两个红色机臂和两个白色机臂。我们可以将两个红色机臂放在四轴飞行器的前部,将两个白色机臂放置在四轴飞行器的后部,当四轴飞行器在空中时,我们就会知道其前方是哪个方向。
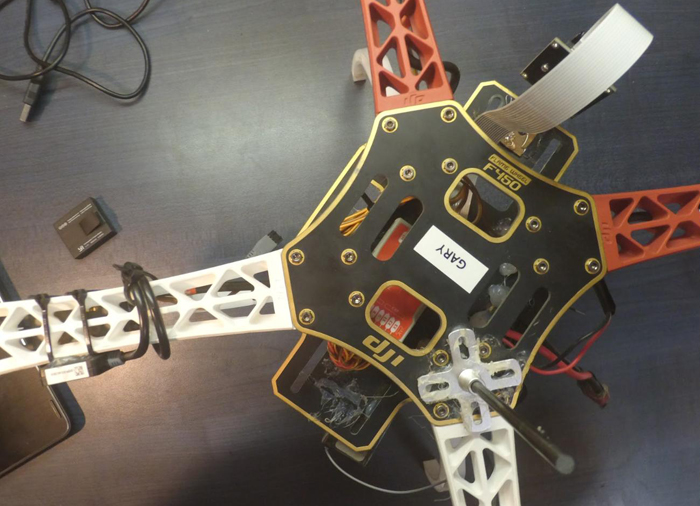
图12:每个机臂都用螺栓固定到顶板上
请用机架附带的螺栓将机臂固定到顶板上,每个机臂用四个螺栓。请确保两个红色机臂位于ESC伺服线与M1和M2相连的NAZA侧——这将是四轴飞行器的前部。下一步之后,您会看到每个机臂实际上都“夹在”顶板和底板之间。
第9步:安装支腿和底板

图13:机架所用的支腿
F450 ARF套件附带的白色支腿(如上图所示)负责在起飞和降落期间保护四轴飞行器下方的重要电子设备。请用机架附带的长螺栓连接支腿。支腿应位于机臂正下方,安装时螺栓要穿过支腿、底板,进入机臂底部。请确保ESC电源线从机臂底部弧形部分下方的机架中伸出。请为每个机臂重复此过程。
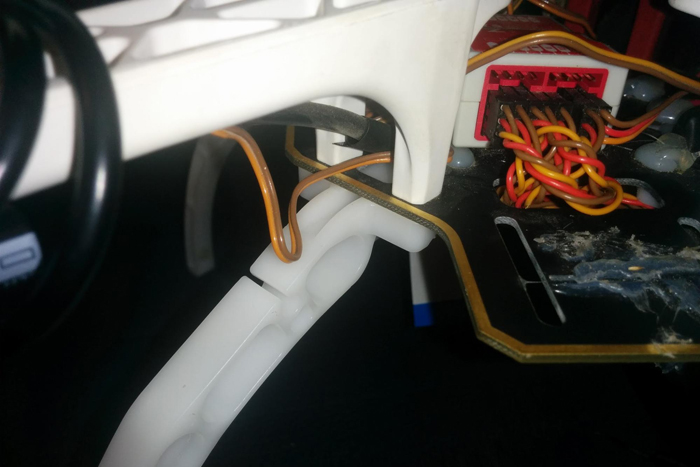
图14:位于机臂正下方的支腿。请注意,ESC线穿过机臂空间的方式。
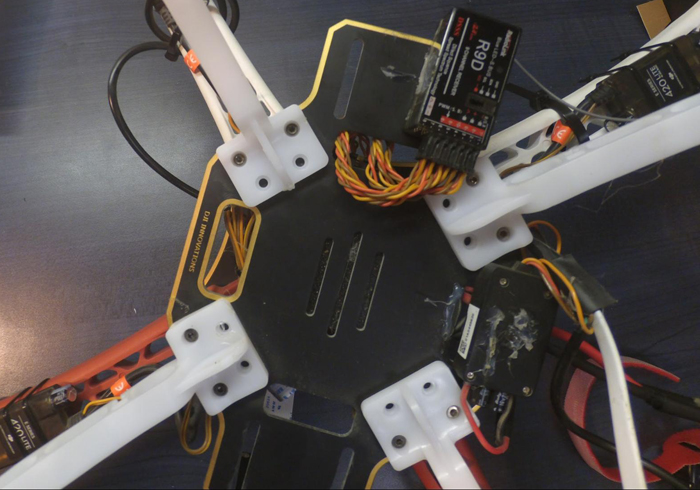
图15:支腿如何固定在机架底部
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

