
作者:内蒙古科技大学 李献晓 胡书配 赵文强
指导教师:郭宇
产品简介
1.1开发背景
每年在我国森林火灾都时有发生,国家为了防范森林火灾,每年都得动用大量人力财力,而且还得不到满意效果。究其原因:森林面积大,不变行走排查。动用大型直升机又显得劳师动众,一般又不能及时发现火灾断绝火源。
消防队员救人时,由于不知道高楼那里有人在求救,常常耽误最佳救人时机。
地质勘探员为了策划现场勘探,往往需要亲身前往,又不熟悉地形,常常忽略一些重要地放的勘探(比如人际罕至或者不便到达的地方)。
边防警察人数有限,又需要在指定地点巡逻站岗,就难免有疏漏的地方,导致任务不能完美完成。
基于以上情况我们设计发明了这款基于GPS的导航飞机,只需要设定目的地GPS坐标,然后在飞机接受到起飞命令后,就会自动导航避障直到到达目的地。途中不断返回当前的GPS,以便检测飞机当前状态。途中可以通过3G网络传回影像来达到目的。
关于对目标发现的处理,不同用途,处理方法也不同。比如深林火险可以通过其自身的烟雾传感器和火焰传感器来进行识别,并通过广播发射信号进行警报。还可以用电脑对视频截取分析,通过判别特征来判断是否有火灾。
因此可以用来代替人工排查,既可以全天候值守,又可以及时发现问题解决问题。比如发现火灾消除火源,及时发现被困人员对环境勘察监视等等。
1.2结构说明
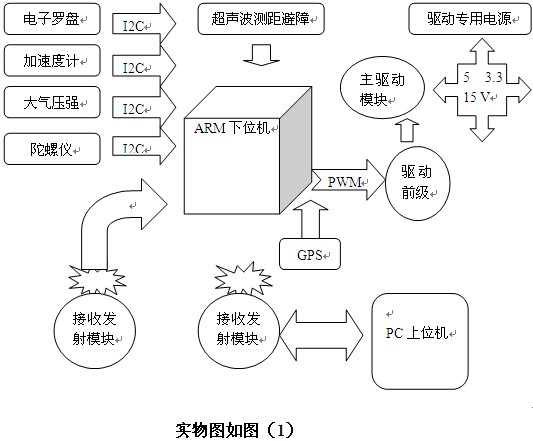
(1) 主控模块:本模块是比赛所提供的飞思卡尔pk10dn512vll100芯片。
(2) 编程环境kiel4.X,编程工具jlinkV8.0。
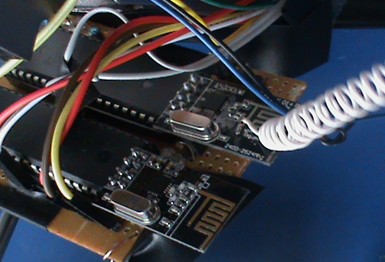
(3) 无线收发模块采用的是一对NRF24L01+作为收发。(如果用zigbee会更好)
(4) GPS
(5) 传感器模块:陀螺仪加速度6050。
(6) 电子罗盘HMC5843
(7) 大气压强BMP085。都为I2C传输数据的,因此只占用两个引脚。
(8) PC上位机:
1.在vc++2006的平台上编写了串口程序,直升机上位导航系统是基于MFC对话框设计出的一款上位机。上位机通过无线收发模块与下位机进行通讯。
1.3功能与使用说明
(1)功能:本作品可以通过串口来接受单片机发过来的数据,并实时显示在上位机。
(2)使用说明:PC机在vc++6.0的基础运行。
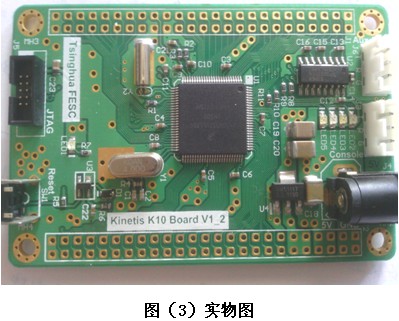
平台选型说明
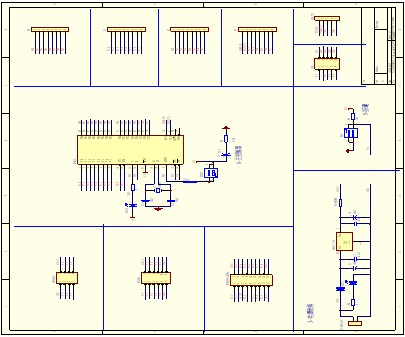
主控部分采用比赛组委会提供的清华大学最新飞思卡尔系列pk10dn512vll100芯片,本ARM简单、可靠,控制功能有了很大的提高,而且运算比同类明显快得多。其原理图和实物图如(2),(3)下图所示
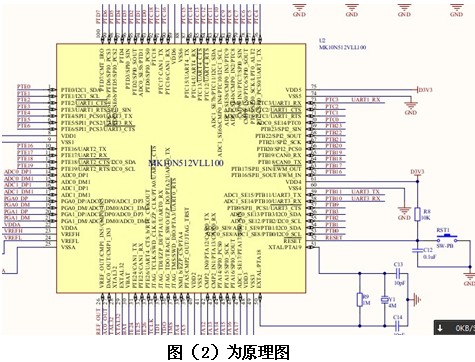
1.采用清华大学最新ARM系列pk10dn512vll100芯片。
2. 98MHZ,单时钟/机器周期。
3.512K字节片内片内Flash程序存储器,擦写次数10万次以上。
4.片内大容量128KB。
5.大容量片内EEPROM,擦写次数10万次数以上。
6.5组高速异步串行通信端口
复用可当5组串口使用。
7.各种接口扩展齐全。
8.一根优质USB线实现系统供电、程序下载、通信功能。
设计说明
3.1设计要求
能够根据指令做相应的动作,并能自动到达目的坐标。
3.2系统硬件电路设计
3.2.1 信息采集模块
本模块由两部分组成,由一对单片机分别对应一对NRF24L01+最为收发模块并将数据传给下位机或者上位机。
◆2.4~2.5GHz全球免申请ISM工作频段。
◆125个通讯频道,满足多点通讯、分组、跳频等应用需求。
◆发射功率可设置为:0dBm、-6dBm、-12dBm和-18dBm。
◆实际发射功率≥0dBm(设置为0dBm时测试得出)。
◆SMA接口,可方便连接同轴电缆或外置天线。
◆通过SPI接口与MCU连接,速率0~8Mbps。
◆支持2Mbps、1Mbps和250kbps传输速率。
◆增强型ShockBurst,完全兼容nRF2401A、nRF24L01等芯片。
◆支持自动应答及自动重发,内置地址及CRC数据校验模功能。
◆工作电压范围:1.9V~3.6V,待机模式下电流低于1µA。
◆工作温度范围:-40℃~+85℃
采用串口中断接受,发送字节长度32位,发送缓冲TxBuf;第一位为接受判断标志,第二位为判忙标志位,第三位暂时为空。接下来的为有效数据位,首位为’$’,结束为’*’,中间数据以’,’隔开。
3.2.2 上位机模块
NRF24L01+将按键的信息经过c52传给pc机,pc机通过串口来接收数据,从而显示显示相应的信息,获取飞机坐标及飞行姿态。或者上传命令或者下一个目的坐标。
3.3系统软件设计
下面是上位机的界面。
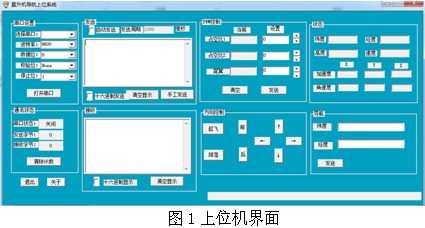
2.直升机上位导航主要完成监测飞机状态,主要包括主螺旋桨、副螺旋桨和尾翼的PWM值,当前经纬度坐标,速度,加速度,旋转角速度。可以设置飞机的PWM值,设置目标点的经纬度坐标,并通过串口发送。还可以通过发送一些控制命令来控制飞机飞行。
3.上位机通过一定的格式来发送数据,下位机按对应的格式接收数据包并解析。下面是一些上位机发送及接受一些数据的例子:
(1)、pwm发送格式: $REPWM,1234,24,56,*E
(2)、陀螺仪发送: $REACG,1223,23,544,5,67,34,*E
(3)、经度纬度及海拔.
$GPGGA,161229.487,3723.2475,N,12158.3416,W,1,07,1.0,9.0,M, , , ,0000*18
(4)、定位状态
$GPGSA,A,3,07,02,26,27,09,04,15, , , , , ,1.8,1.0,1.5*33
(5)、速度
$GPVTG,309.62,T, ,M,0.13,N,0.2,K*6E
(6)、控制
come前:$CTRLF,C,*E
back 后:$CTRLF,B,*E
left 左:$CTRLF,L,*E
right 右:$CTRLF,R,*E
up 上:$CTRLF,U,*E
down下:$CTRLF,D,*E
fly 起飞:$CTRLF,F,*E
land 降落:$CTRLF,A,*E
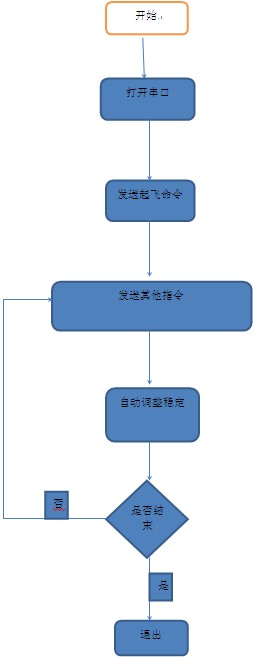
4、直升机上位系统流程图
作品特色
先进性
现在的许多领域仍然用人工,但是极其不方便。比如森林火灾检查,农场作物视察,蝗虫范围性害虫防治,特殊环境勘探等。如果用此款直升机来替代,将取得事半功倍的效果。
实用性
一个几百公顷的农场只需几架导航直升机无人值守,不到两个小时就可以调查出农作物分布生长情况;几十架一上午就可以对一个县区的害虫分布及危害进行全面大的调查;几十架就可以对大兴安岭进行常年无人值守;消防队员可以在几分钟的时间内对几十层高楼进行全面排查等等。
创新性
改变了传统小型直升机只能用来玩的局面,彻底抛弃了短距离遥控,以及人工实时控制,极大的解放了人力,节省了物力财力。赋予直升机更多的能动性,从而促进一些行业的发展。
系统演示视频:http://v.eepw.com.cn/video/play/id/2581
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

