
458楼
让四轴飞大哥,我想请教一个问题,我的烈火小四轴用你的程序没有问题,然后我自己用相同型号的stm32最小系统和无线收发模块和mpu6050模块跟好盈无刷电调和无刷电机自己搭建了一只四轴,完全复制烈火的硬件方式,也移植了你的程序,不过改了一下pwm的频率和脉宽,然后问题来了,自己的四轴跟烈火遥控通信正常,有油门有方向,但是无论怎么调pid的p参数,电机都不会根据飞机倾斜角度作出反应,可以说mpu6050模块不工作,模块原理图如下:

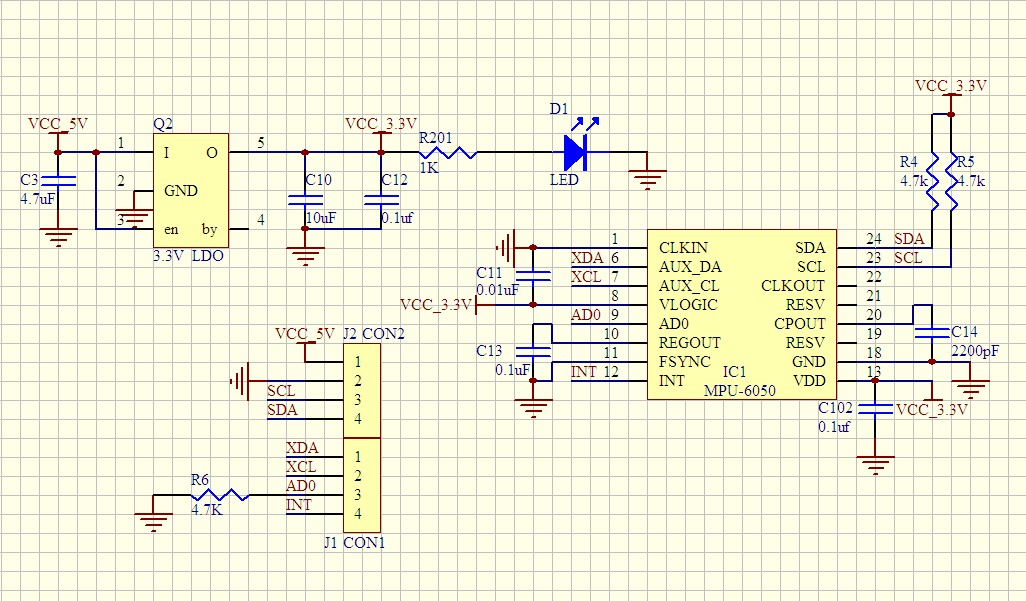
一开始我让AD0悬空,后来对比发现烈火的AD0是接地于是我也接地以为问题解决了,可是还是没工作的样子,求大神指教一下!感激不尽!
459楼
先用其他验证过的IIC程序测试一下模块是不是好的;如果是好的,用仿真器连接看看你的程序里有没有读到数据,那个5us不准确,有时候需要8us左右,我也不知道是怎么回事
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

