
关于PWM控制电机
研究了一下,咱们的四轴只用了TIM2,在进行配置的时候,得多注意。
不多说,上视频。。。
http://v.youku.com/v_show/id_XNjk4OTEwNDky.html
http://v.youku.com/v_show/id_XNjk4OTExMzc2.html
如果有希望交流代码的,可以留言。O(∩_∩)O~
关于PWM控制电机
研究了一下,咱们的四轴只用了TIM2,在进行配置的时候,得多注意。
不多说,上视频。。。
http://v.youku.com/v_show/id_XNjk4OTEwNDky.html
http://v.youku.com/v_show/id_XNjk4OTExMzc2.html
如果有希望交流代码的,可以留言。O(∩_∩)O~
移植crazyflie之角度传感器控制电机
今天移植了crazyflie,实现角度传感器控制电机,但是出现了一个比较悲催的问题,传感器与电机的反应正好相反,明天调试。。。还有本想用匿名四轴上位机来校正一下信息,结果上位机的串口只显示接收的个数,不显示内容。。。不知道为什么,有大神知道么?
上今天调试的视频。。。
今天把传感器与电机的反应正好相反的问题给解决了。
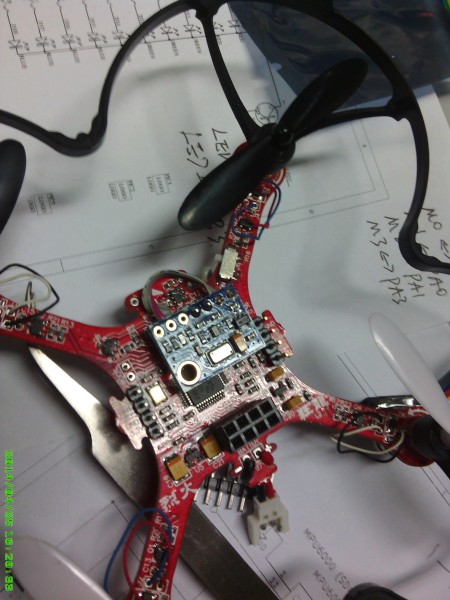
上图吧。。。
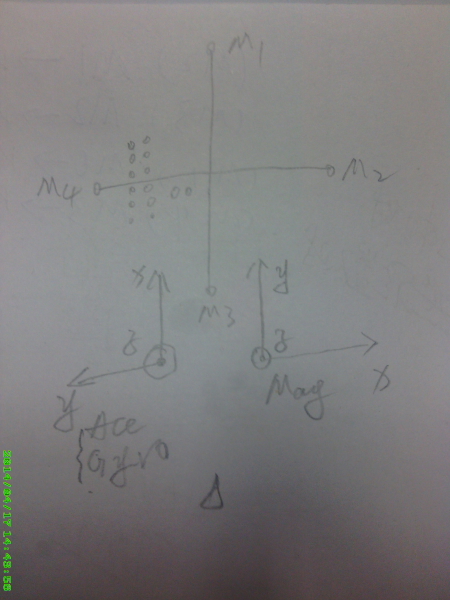
上图是crazyflie的传感器和电机的对应关系。。。
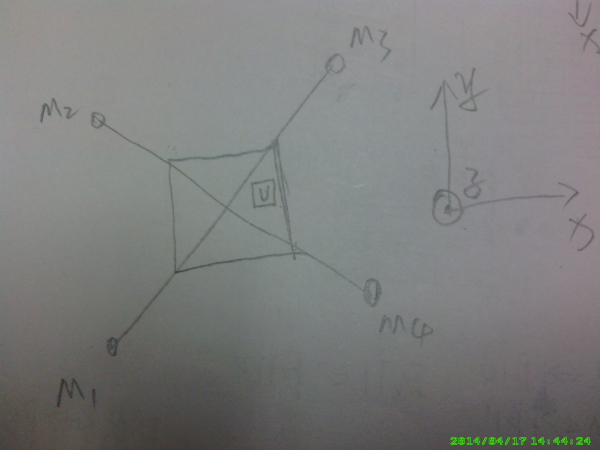
上图是这次活动四轴传感器和电机的对应关系。。。
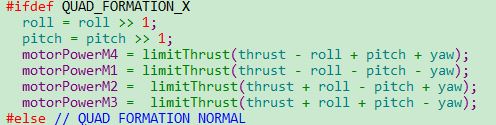
在函数static void distributePower(const uint16_t thrust, const int16_t roll,const int16_t pitch, const int16_t yaw)中,有两种姿态模式,需要定义宏QUAD_FORMATION_X,并且motorPowerMx要修改一下对应关系。

motorPowerM1换成motorPowerM4,motorPowerM2换成motorPowerM1,motorPowerM3换成motorPowerM2,motorPowerM4换成motorPowerM3.如图:
今天加上了指南针和高度传感器
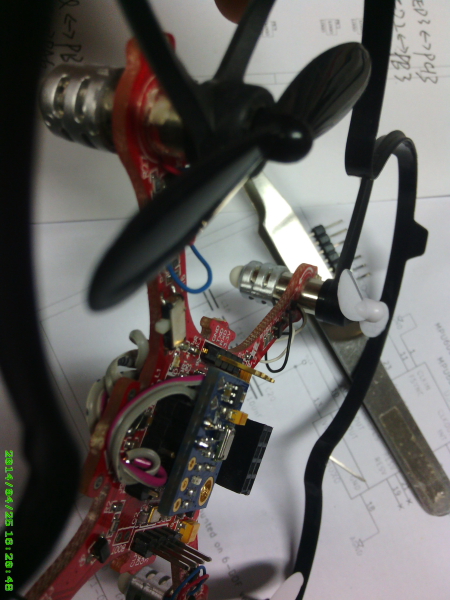
下图是指南针,为了协调方向,就把它黏在这里了

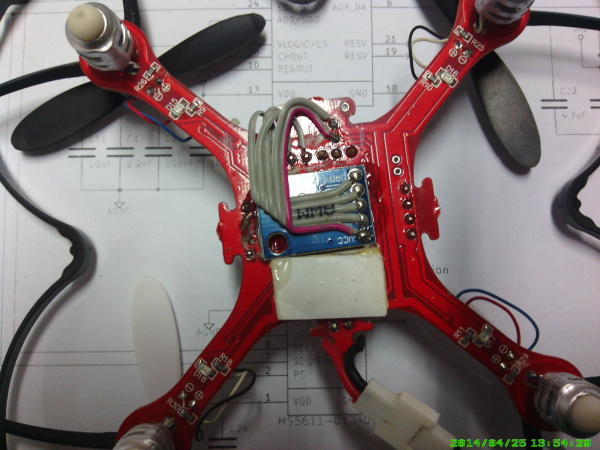
下图是气压传感器MS5611用作测量高度,焊接方式如下
利用四轴上提供的接口焊上插针,然后将模块焊在插针上,用来固定,正好那两个是I2C1的两个引脚。
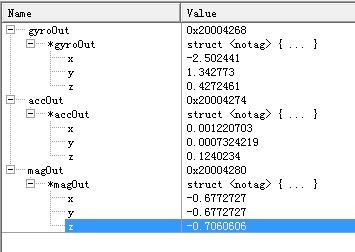
下图是软件运行结果
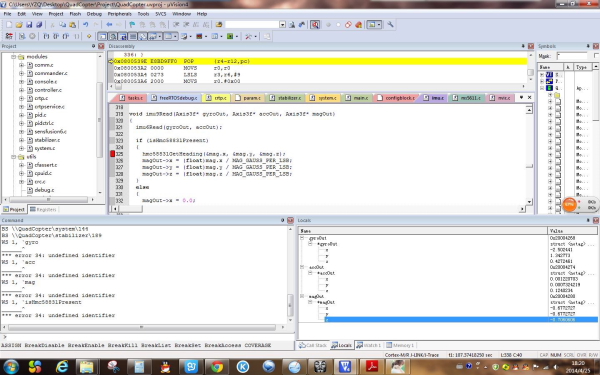
可以看到读取的数据
明天去听大师讲解!!!
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

