
目录篇
一:开箱、组装--------------------------------------2
二:小车基本测试------------------------------------3
三:给小车下载例程----------------------------------7
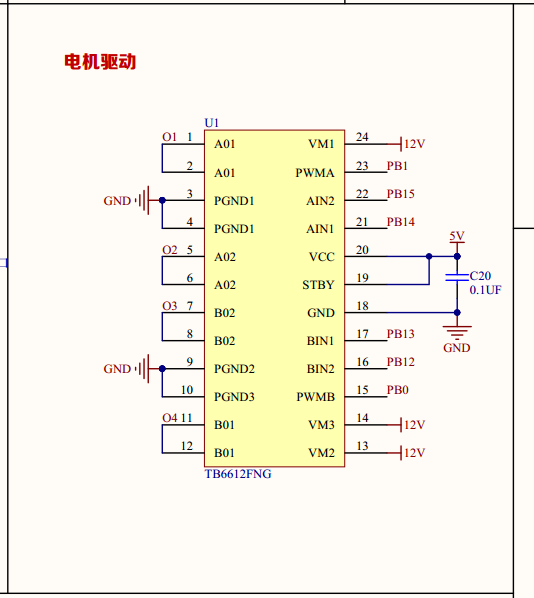
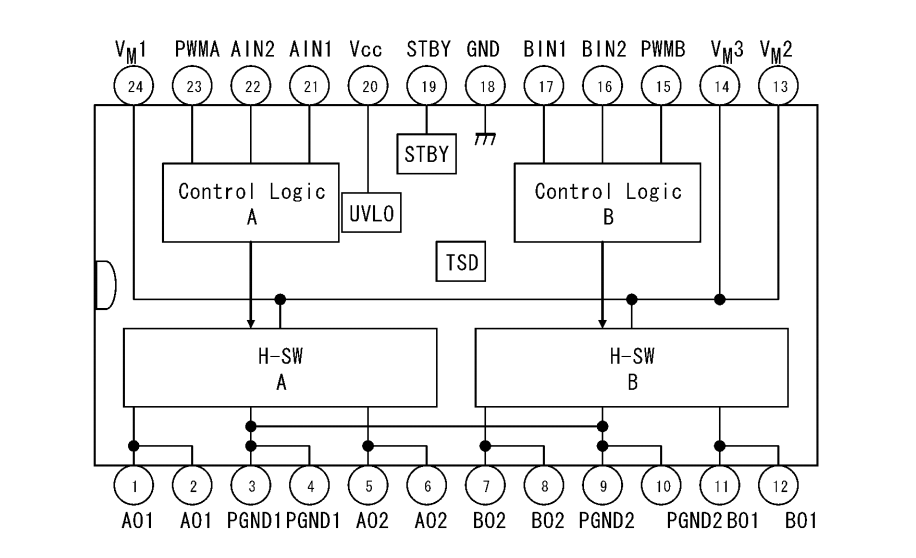
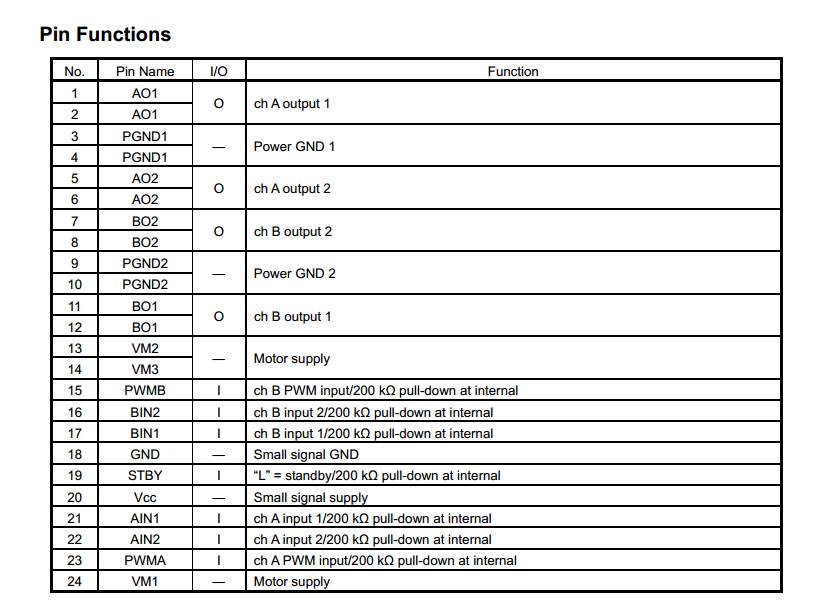
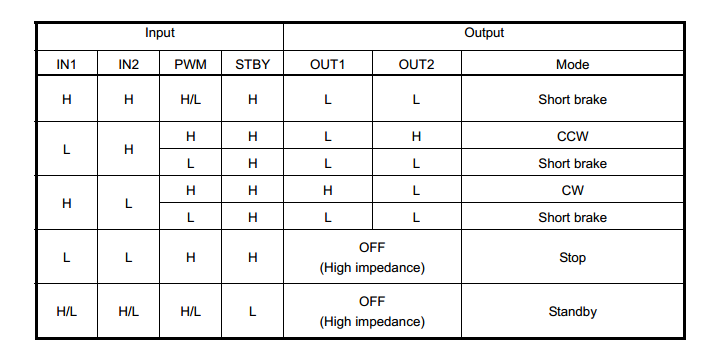
四:小车的电机驱动
小车组装完后,进行一下基本测试,首先打开电源开关,可以看到蓝色和红色的灯在闪烁、
OLED上显示操作方式,电压角度之类的值,编码器的值为0 ,貌似是数值太大的原因,还不太确定,因为可以看到从几百降到0,关的时候

现在还不能自己平衡,然后按一下左上角的开关(拨码开关在ON位置),车子就可以平衡的站住了,就是来回摆动较大,因为是测试程序,这个还得后面自己调试
再下一步,手机连接小车,这一步比较简单,配对密码是1234,还没研究
模块,应该可以自己改蓝牙名称的
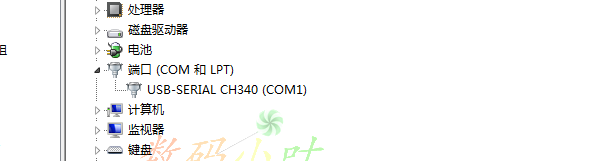
最后一项,测试上位机显示,首先拿一个usb转串口线,和主控板连接,GND ---GND,RXD---PA9,TXD---PA10,注意,这块vcc不要接。保证小车电池供电,不然容易损坏usb口,小车的电流比较大。
软件这块唯一要改的就是波特率和串口号,操作可以看下图:


测得数据波形:
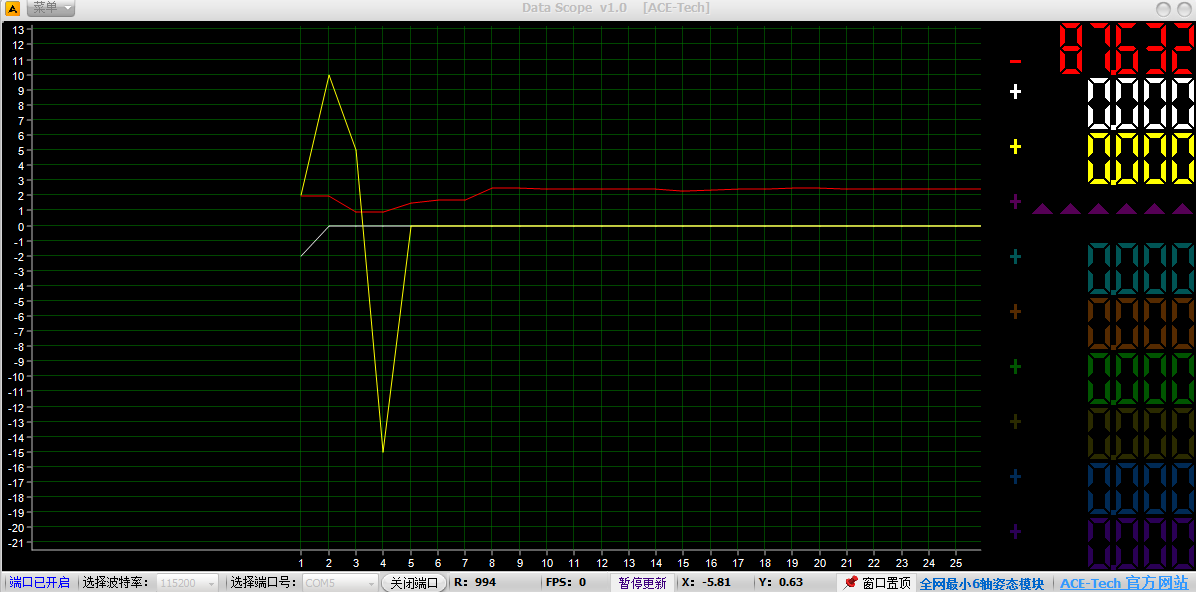
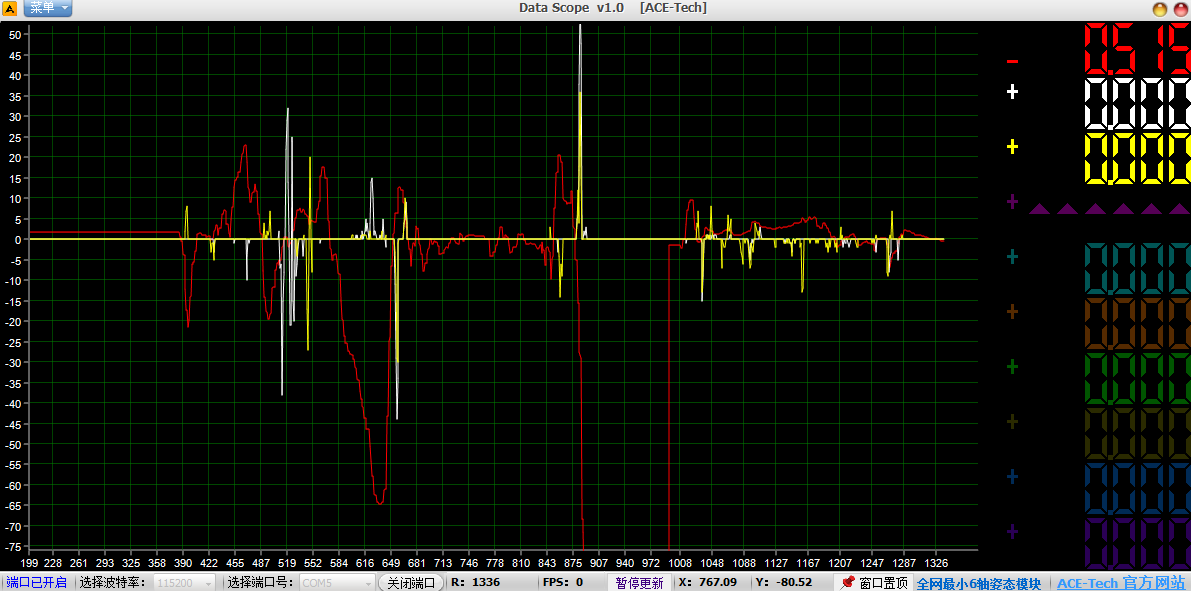
至此,小车的基本的测试完毕。
一直在断断续续的看PID和MPU6050的资料,这周算是正式开始弄小车了,弥补了好多知识,尤其PID这块,以后用到再说。首先,终于可以给小车下载程序了,借用nucleo板的STLINK来调试,可以很方便
首先看下小车的原理图,下载部分
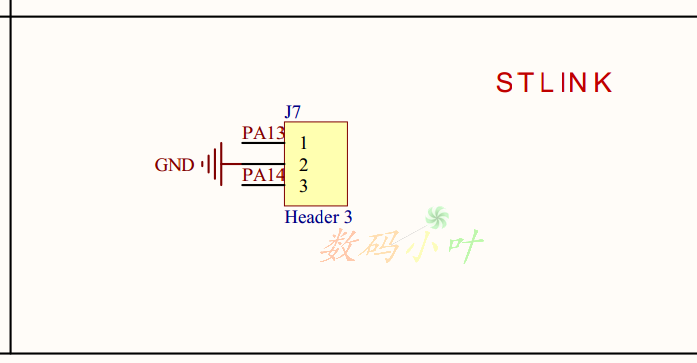
然后再看STM32F1xx的参考手册,看下PA13和PA14管脚的定义
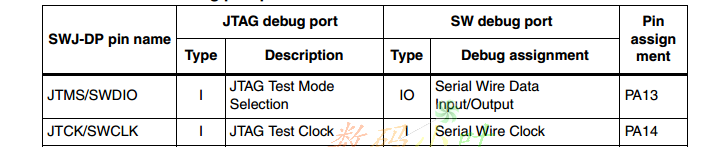
这样就ok了,知道定义就好接线了,在来看下nucleo板的STLINK引脚定义
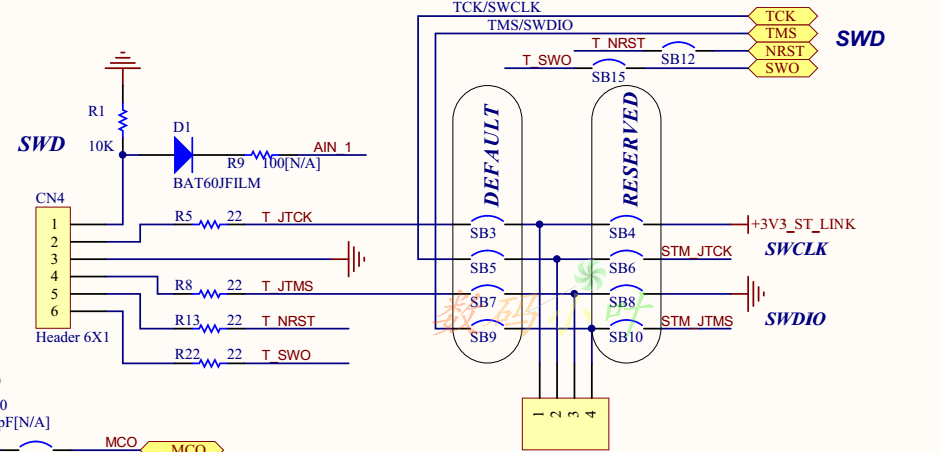
结合图,可以看出,我们只需要连接2、3、4引脚即可,其他引脚用不到
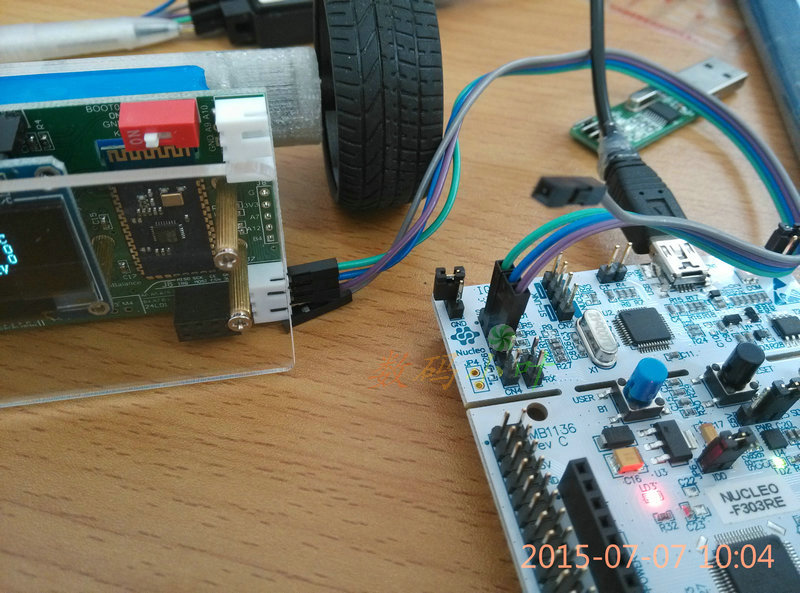
连接完后,用软件测试下,看是否连接成功
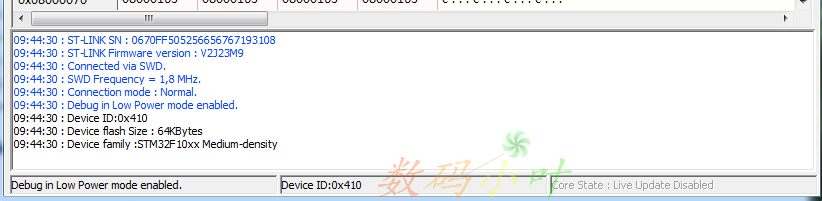
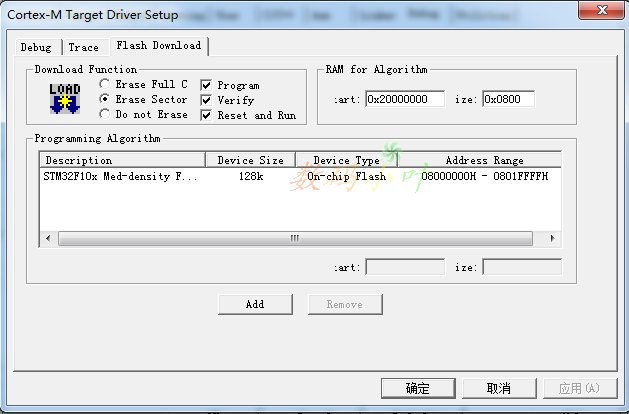
软件正确识别出了小车的芯片,这样就这么连线没问题了,然后再对keil进行必要的设置,就成功了
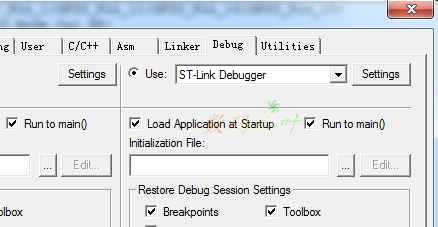
设置下载方式为ST-Link
然后,点load下载
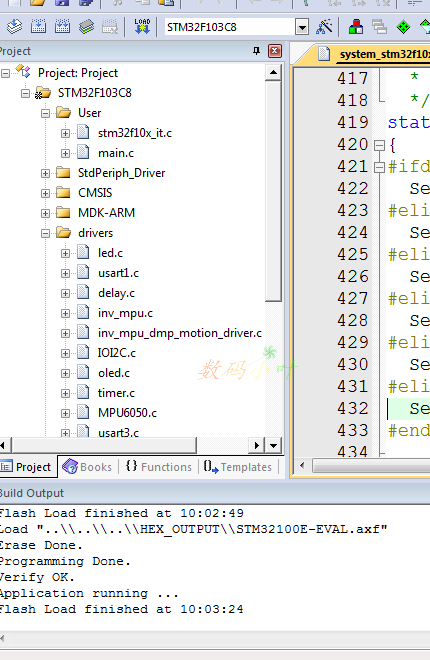
程序下载成功
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |





 加油。。来给你顶帖
加油。。来给你顶帖  STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

