
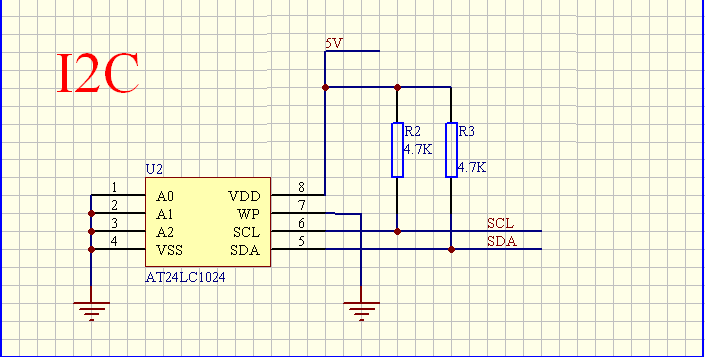
模拟I2C程序,EEPROM器件是:AT24C1024,也就是1k bit的,即128k字节
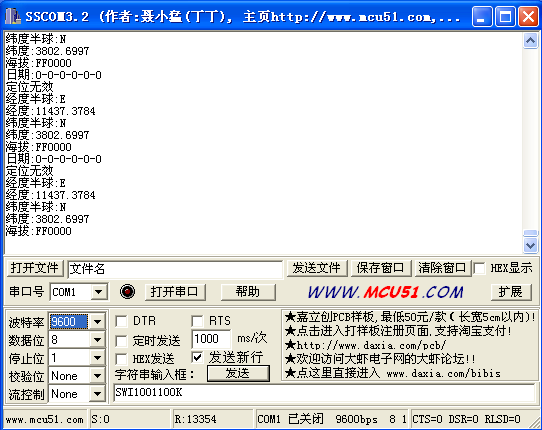
通过串口程序来验证:先写I2C,后读I2C,两者的数相同!!(以下程序中的puts:为串口输出的字符,串口程序参考的UART实验)
#include "mb95200.h"
u8 E0; //非应答信号标志位
u8 NACK=0; //错误标志位
#define SDA PDR0_P06
#define SDA_D DDR0_P06
#define SCL PDR0_P05
#define SCL_D DDR0_P05
#define WriteDeviceAddress 0xa0 //写I2C外围器件的寻址地址
#define ReadDeviceAddress 0xa1 //读I2C外围器件的寻址地址
void WriteI2C(u8 *Wdata,u8 RomAddress,u8 number); // 写n个字节数据子程序
void ReadI2C(u8 *RamAddress,u8 RomAddress,u8 bytes); // 读n个字节数据子程序
void delay5us(u16 len)
{
u16 i;
for(i=0;i<len;i++)
__wait_nop();
}
void Start(void) //启动I2C总线子函数
{
SCL_D=1;
SCL=1;
SDA_D=1;
SDA=1;
delay5us(5);
SDA=0;
delay5us(5);
SCL=0;
}
void Write8Bit(u8 n) //写一个字节数据子程序,n为待发送的数据
{
u8 i,temp;
for(i=8;i>0;i--)
{
SCL_D=1;
SDA_D=1;
temp=n&0x80;
if(temp==0x80) SDA=1;
else SDA=0;
SCL=1;
delay5us(5);
SCL=0;
SDA=0;
n=n<<1;
}
}
void Stop(void) //停止I2C总线数据传送子函数
{
SDA_D=1;
SDA=0;
SCL_D=1;
SCL=1;
delay5us(5);
SDA=1;
delay5us(5);
SCL=0;
}
void Ack(void) //发送应答位子程序
{
SDA_D=1;
SDA=0;
SCL_D=1;
SCL=1;
delay5us(5);
SCL=0;
SDA=1;
}
void NoAck(void) //发送非应答位子程序
{
SDA_D=1;
SDA=0;
SCL_D=1;
SCL=1;
delay5us(5);
SCL=0;
SDA=0;
}
void TestAck(void) //应答位检查子程序,若检测不到非应答信号
{
SDA=1;
SCL=1;
SDA_D=0;
E0=0;
delay5us(1);
if(SDA==1) E0=1;
SCL=0;
}
u8 Read8Bit(void) //读一个字节数据子程序
{
uchar temp,rbyte=0;
for(temp=8;temp>0;temp--)
{
SDA_D=0;
SDA=1;
SCL_D=1;
SCL=1;
delay5us(5);
rbyte=rbyte<<1;
rbyte=rbyte|((u8)(SDA));
SCL=0;
}
return(rbyte);
}
void WriteI2C(u8 *Wdata,u8 RomAddress,u8 number) // 写n个字节数据子程序
{ //*Wdata为待发送数据的首地址,RomAddress为待I2C外围器件的数据写入首地址,number为写字节的个数
Start(); //启动
Write8Bit(WriteDeviceAddress); //写入器件的寻址地址
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK00\n");
return;
}
Write8Bit(0x00); //写入I2C器件页地址
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK01\n");
return;
}
Write8Bit(RomAddress); //写入I2C器件的数据存储首地址
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK02\n");
return;
}
//zhai start
//zhai end
for(;number!=0;number--) //循环,逐个字节发送
{
Write8Bit(*Wdata); //写一个字节
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK03\n");
return;
}
Wdata++; //指针增加,指向下一个数据
}
Stop(); //全部发送完则停止
}
void ReadI2C(u8 *RamAddress,u8 RomAddress,u8 bytes) // 读n个字节数据子程序
{ //RamAddress为接收数据缓冲区的首地址,RomAddress为待I2C外围器件的数据读取首地址,bytes为写字节的个数
Start(); //启动
Write8Bit(WriteDeviceAddress); //写入器件的寻址地址
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK10\n");
return;
}
Write8Bit(0x00); //写入I2C器件页地址
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK11\n");
return;
}
Write8Bit(RomAddress); //写入I2C器件内部数据的读取首地址(页内地址)
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK12\n");
return;
}
Start(); //重新启动
Write8Bit(ReadDeviceAddress); //写入器件的寻址地址 0xA1
TestAck(); //应答检查
if(E0==1)
{
NACK=1; //若非应答表明器件错误或已坏,置错误标志位NACK
puts("NACK13\n");
return;
}
while(bytes!=1) //循环读入字节数据
{
*RamAddress=Read8Bit(); //读入一个字节
Ack(); //应答
RamAddress++; //地址指针递增
bytes--; //待读入数据个数递
}
*RamAddress=Read8Bit(); //读入最后一个字节数据
NoAck(); //非应答
Stop(); //停止
}


 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

