
共8条
1/1 1 跳转至页




4.焊接总结
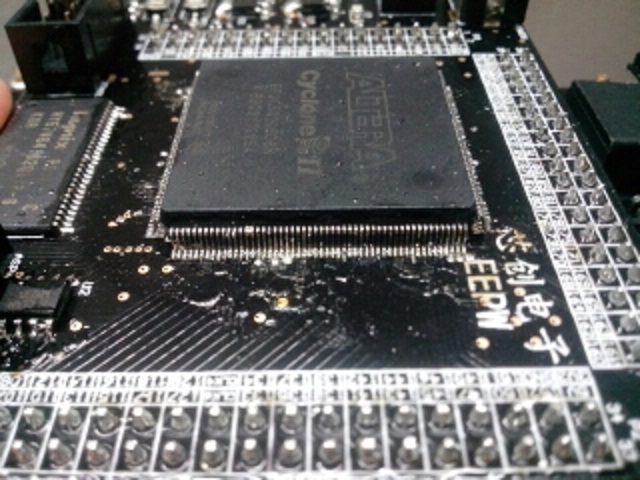
(1) 这么多、这么细引脚的芯片还是第一次焊接,本来以为很容易搞定(有点眼高手低的意思),谁知最终差不多花了一个小时才焊好,还把一个引脚搞弯了,和旁边的一个引脚连接在一起,不过幸好两个引脚的网络是一样的,还有其他几个连锡的地方对照原理图,一一搞定。本来想使用刀头焊接的,换上后用的很不习惯,果断换上斜口。
(2) 核心板焊接完成后,用万用表检查发现1.2V电源网络短路,去掉磁珠后发现与芯片连接的电路发生短路,检查芯片引脚焊接情况,发现芯片引脚朝内的那部分焊盘沾锡过多,与旁边焊盘连接在一起导致短路,正好引脚在芯片的一个角上,换上尖嘴烙铁头,去锡后测试正常。同时,对其他的引脚进行了检查。不知道焊接时间太久了,还是焊盘设计的问题,导致引脚焊盘靠芯片内部的地方残留较多焊锡?
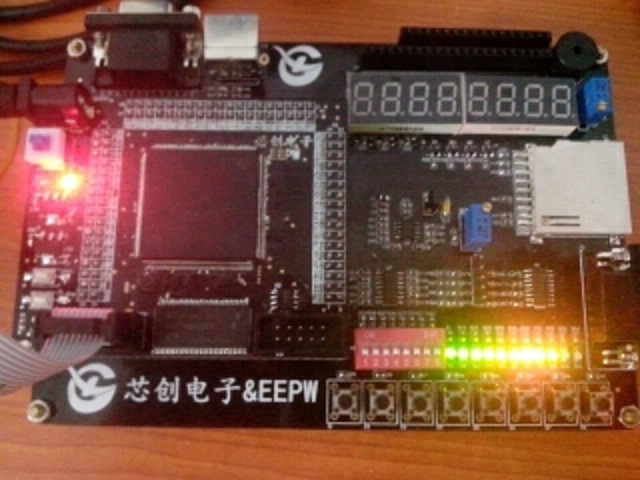
(3) 测试完毕后,上电测试,工作正常。于是开始下测试程序(用的是51FPGA的,用的也是Y2晶振),闪烁灯程序,程序能正常下载,但是怪事发生了,所有LED全部一直点亮,并没有出现交替点亮的现象。换用流水灯程序,也是所有灯一直点亮,没出现流水灯的现象。于是对着教程,仅对LED进行点亮操作,发现工作正常。对照几个程序,初步估计是晶振的问题,拆下核心板,查看晶振电路,一看就头大了,居然把与晶振连接的电阻焊成了电容,赶紧焊回来,重新下载程序,这次终于正常了。心中感慨啊,又应了忙中出错那句话!

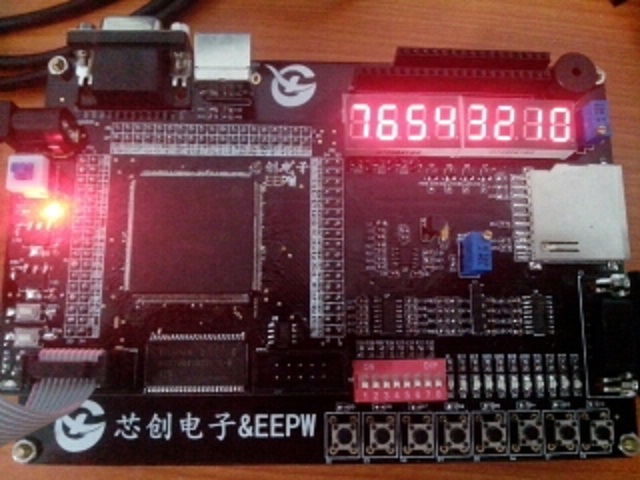
4.开关控制数码管显示
波动开关,数码管显示相应数字
用case语句实现。
5.数码管模60计数器
为了减少视频时间,把计数改为0.125s记一次,
部分代码如下:
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
uni<=1'd0;
ten<=1'd0;
end
else
begin
if(de_cnt==26'd6259999)
begin
if(uni==4'd9 && ten<3'd5)
begin
uni<=1'd0;
ten<=ten+1'd1;
end
else if(uni==4'd9 && ten==3'd5)
begin
uni<=1'd0;
ten<=1'd0;
end
else
uni<=uni+1'd1;
end
end
end
always @(dis_dat)
begin
case(dis_dat)
3'b000: sm_bit=8'b11111110;
3'b001: sm_bit=8'b11111101;
default sm_bit=8'b11111111;
endcase
end
always @(sm_bit)
begin
case(sm_bit)
8'b11111110: datout_buf<=uni;
8'b11111101: datout_buf<=ten;
default datout_buf=0;
endcase
end
always @(datout_buf)
begin
case(datout_buf)
4'd0: sm_seg=8'hc0;
4'd1: sm_seg=8'hf9;
4'd2: sm_seg=8'ha4;
4'd3: sm_seg=8'hb0;
4'd4: sm_seg=8'h99;
4'd5: sm_seg=8'h92;
4'd6: sm_seg=8'h82;
4'd7: sm_seg=8'hd8;
4'd8: sm_seg=8'h80;
4'd9: sm_seg=8'h90;
default sm_seg=8'hc0;
endcase
end
endmodule
波动开关,数码管显示相应数字
用case语句实现。
5.数码管模60计数器
为了减少视频时间,把计数改为0.125s记一次,
部分代码如下:
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
uni<=1'd0;
ten<=1'd0;
end
else
begin
if(de_cnt==26'd6259999)
begin
if(uni==4'd9 && ten<3'd5)
begin
uni<=1'd0;
ten<=ten+1'd1;
end
else if(uni==4'd9 && ten==3'd5)
begin
uni<=1'd0;
ten<=1'd0;
end
else
uni<=uni+1'd1;
end
end
end
always @(dis_dat)
begin
case(dis_dat)
3'b000: sm_bit=8'b11111110;
3'b001: sm_bit=8'b11111101;
default sm_bit=8'b11111111;
endcase
end
always @(sm_bit)
begin
case(sm_bit)
8'b11111110: datout_buf<=uni;
8'b11111101: datout_buf<=ten;
default datout_buf=0;
endcase
end
always @(datout_buf)
begin
case(datout_buf)
4'd0: sm_seg=8'hc0;
4'd1: sm_seg=8'hf9;
4'd2: sm_seg=8'ha4;
4'd3: sm_seg=8'hb0;
4'd4: sm_seg=8'h99;
4'd5: sm_seg=8'h92;
4'd6: sm_seg=8'h82;
4'd7: sm_seg=8'hd8;
4'd8: sm_seg=8'h80;
4'd9: sm_seg=8'h90;
default sm_seg=8'hc0;
endcase
end
endmodule
6.按键控制数码管循环显示0~9
先做了按键没经过消抖的实验,点亮LED时发现灯的状态基本是随机的,数码管显示也是随机的数字,还以为是代码写的有问题,加上消抖后,显示就很正常了,按键的抖动非常厉害。
主要代码:
初始状态:灯亮,数码管显示0
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
data<=1'd0;
else
if(key_low)
begin
led_out<=~led_out;
if(data==4'd9)
data<=1'd0;
else
data<=data+1'd1;
end
end
always @(data)
begin
case(data)
4'd0: sm_seg=8'hc0;
4'd1: sm_seg=8'hf9;
4'd2: sm_seg=8'ha4;
4'd3: sm_seg=8'hb0;
4'd4: sm_seg=8'h99;
4'd5: sm_seg=8'h92;
4'd6: sm_seg=8'h82;
4'd7: sm_seg=8'hd8;
4'd8: sm_seg=8'h80;
4'd9: sm_seg=8'h90;
default sm_seg=8'hc0;
endcase
end
assign sm_bit=8'b11111110;
endmodule
先做了按键没经过消抖的实验,点亮LED时发现灯的状态基本是随机的,数码管显示也是随机的数字,还以为是代码写的有问题,加上消抖后,显示就很正常了,按键的抖动非常厉害。
主要代码:
初始状态:灯亮,数码管显示0
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
data<=1'd0;
else
if(key_low)
begin
led_out<=~led_out;
if(data==4'd9)
data<=1'd0;
else
data<=data+1'd1;
end
end
always @(data)
begin
case(data)
4'd0: sm_seg=8'hc0;
4'd1: sm_seg=8'hf9;
4'd2: sm_seg=8'ha4;
4'd3: sm_seg=8'hb0;
4'd4: sm_seg=8'h99;
4'd5: sm_seg=8'h92;
4'd6: sm_seg=8'h82;
4'd7: sm_seg=8'hd8;
4'd8: sm_seg=8'h80;
4'd9: sm_seg=8'h90;
default sm_seg=8'hc0;
endcase
end
assign sm_bit=8'b11111110;
endmodule
共8条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

