实验四 消息邮箱
邮箱特像古代的烽火台,只要人(任务)在看到(等待邮箱消息)烽火台点燃,人(任务)就立刻进入下一个操作。实验的源码写得很易懂,创建-A发送-A等待-B收取-B发送-A接收,流程十分清楚。
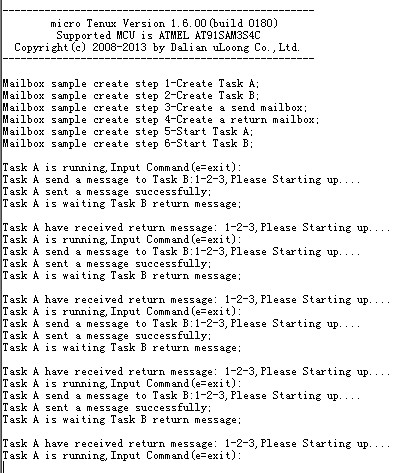
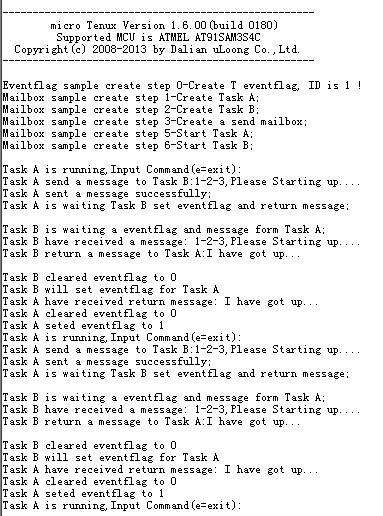
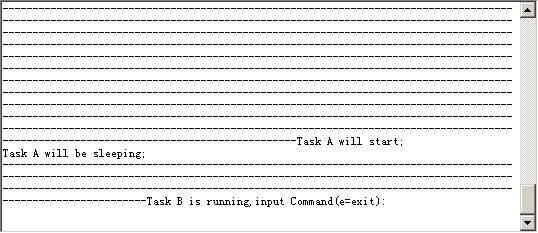
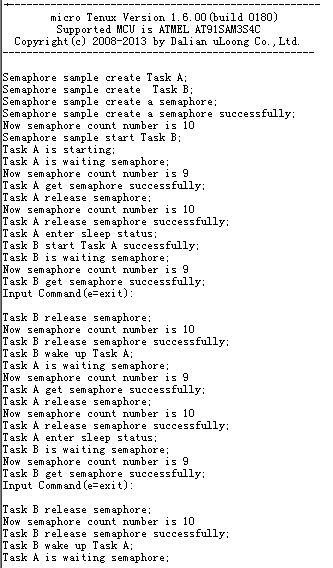
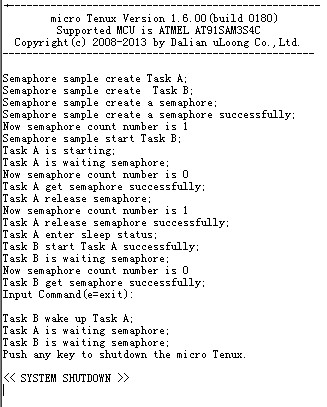
源码编译、下载,得到期望的打印信息。
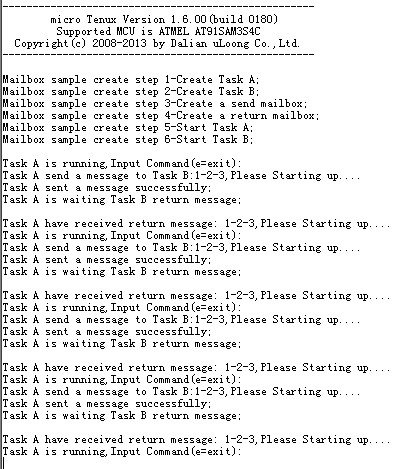
不解释。
想尝试一下多个消息的发送,看看内核规范,源码中邮箱可以设置为FIFO和优先级两种发送模式,设置一下。
FIFO模式:
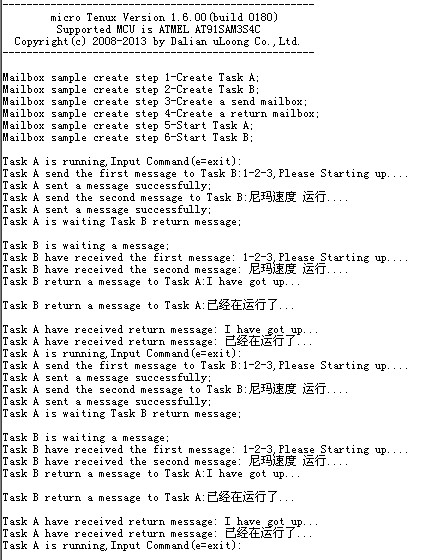
经典的FIFO,先发送的消息先收到。
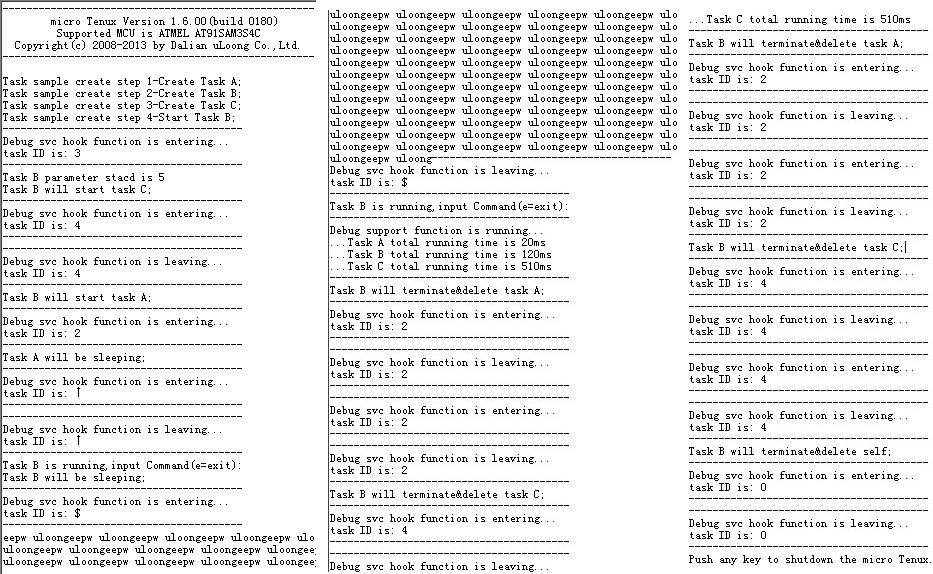
优先级模式:
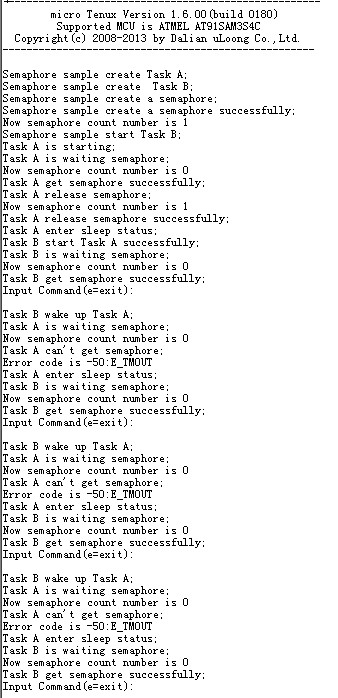
这个模式花了点时间研究T_MSG、U_SMG和T_SMG_PRI之间的关系,但是还存在有问题。
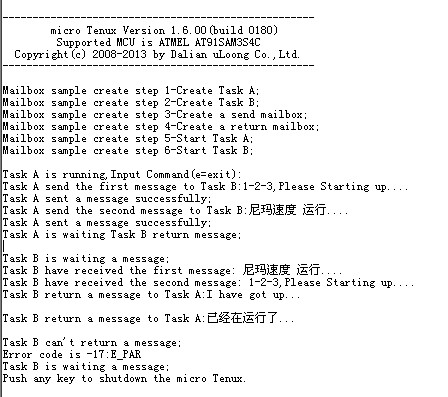
呃,A发送优先级为9的“尼玛速度运行”和优先级为10的“1-2-3,Please starting up....”,B先接收到的是“尼玛速度运行”,再接收“1-2-3,Please starting up....”,是不是和系统的功能一样呢?我觉得是。
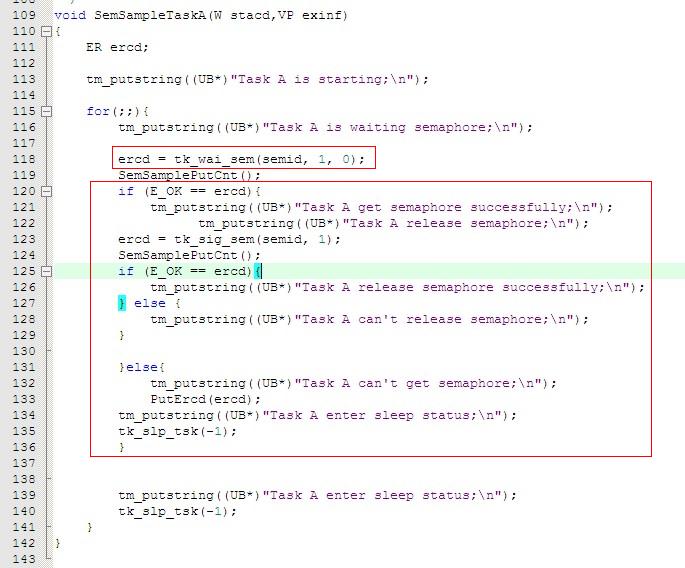
为毛B在发送第二条消息的时候(和A的发送模式一样),会返回E_PAR(错误的参数传递),源代码在下面:
#include "MailboxSample.h"
typedef struct u_msg {
T_MSG msgque; /* Area for message queue */
PRI msgpri; /* Message priority */
UB *usrmsg; /* Area for message pointer */
} U_MSG;
void MbxSampleTaskA(W stacd,VP exinf);
void MbxSampleTaskB(W stacd,VP exinf);
static ID TaskID_A;
static ID TaskID_B;
static ID MbxID_S;
static ID MbxID_R;
ER MbxSample( void)
{
ER ercd=E_OK;
T_CTSK ctsk;
T_CMBX cmbx;
tm_putstring((UB*)"Mailbox sample create step 1-Create Task A;\n");
ctsk.exinf = (VP)NULL;
ctsk.tskatr = TA_HLNG|TA_RNG0;
ctsk.task = MbxSampleTaskA;
ctsk.itskpri = 20;
ctsk.stksz = 512;
TaskID_A = tk_cre_tsk(&ctsk);
if(TaskID_A < E_OK) {
ercd=TaskID_A;
tm_putstring((UB*)"Task A can't creat;\n");
PutErcd(ercd);
return ercd;
}
tm_putstring((UB*)"Mailbox sample create step 2-Create Task B;\n");
ctsk.exinf = (VP)NULL;
ctsk.tskatr = TA_HLNG|TA_RNG0;
ctsk.task = MbxSampleTaskB;
ctsk.itskpri = 24;
ctsk.stksz = 512;
TaskID_B = tk_cre_tsk(&ctsk);
if(TaskID_B < E_OK) {
ercd=TaskID_B;
tm_putstring((UB*)"Task B can't creat;\n");
PutErcd(ercd);
return ercd;
}
tm_putstring((UB*)"Mailbox sample create step 3-Create a send mailbox;\n");
cmbx.exinf = (VP)NULL;
cmbx.mbxatr = TA_TPRI|TA_MPRI;
MbxID_S = tk_cre_mbx(&cmbx);
if(MbxID_S < E_OK){
ercd=MbxID_S;
tm_putstring((UB*)"MailBox_Send can't creat;\n");
PutErcd(ercd);
return ercd;
}
tm_putstring((UB*)"Mailbox sample create step 4-Create a return mailbox;\n");
cmbx.exinf = (VP)NULL;
cmbx.mbxatr = TA_TPRI|TA_MPRI;
MbxID_R = tk_cre_mbx(&cmbx);
if(MbxID_R < E_OK){
ercd=MbxID_R;
tm_putstring((UB*)"MailBox_Recieve can't creat;\n");
PutErcd(ercd);
return ercd;
}
tm_putstring((UB*)"Mailbox sample create step 5-Start Task A;\n");
ercd = tk_sta_tsk(TaskID_A,0);
if (E_OK != ercd){
tm_putstring((UB*)"start Task A failed;\n");
PutErcd(ercd);
}
return TRUE;
}
void MbxSampleTaskA(W stacd,VP exinf)
{
B c;
ER ercd;
U_MSG *pk_rcvmsg,*pk_rcvmsg1;
U_MSG sndmsg,sndmsg1;
tm_putstring((UB*)"Mailbox sample create step 6-Start Task B;\n\n");
ercd = tk_sta_tsk(TaskID_B,0);
if (E_OK != ercd){
tm_putstring((UB*)"Task B is starting failed;\n");
PutErcd(ercd);
}
for(;;){
tm_putstring((UB*)"Task A is running,Input Command(e=exit):\n");
c = tm_getchar(0);
if('e' == c) {
break;
}
sndmsg.msgpri = 10;
sndmsg.usrmsg = "1-2-3,Please Starting up....\n";
tm_putstring((UB*)"Task A send the first message to Task B:");
tm_putstring((UB*)sndmsg.usrmsg);
ercd = tk_snd_mbx(MbxID_S,(T_MSG*)&sndmsg);
if(E_OK == ercd){
tm_putstring((UB*)"Task A sent a message successfully;\n");
}else{
tm_putstring((UB*)"Task A can't send a message;\n");
PutErcd(ercd);
}
sndmsg1.msgpri = 9;
sndmsg1.usrmsg = "ÄáÂêËÙ¶È ÔËÐÐ....\n";
tm_putstring((UB*)"Task A send the second message to Task B:");
tm_putstring((UB*)sndmsg1.usrmsg);
ercd = tk_snd_mbx(MbxID_S,(T_MSG*)&sndmsg1);
if(E_OK == ercd){
tm_putstring((UB*)"Task A sent a message successfully;\n");
}else{
tm_putstring((UB*)"Task A can't send a message;\n");
PutErcd(ercd);
}
tm_putstring((UB*)"Task A is waiting Task B return message;\n\n");
tk_slp_tsk ( -1 ) ;
ercd = tk_rcv_mbx(MbxID_R,(T_MSG**)&pk_rcvmsg,-1);
ercd = tk_rcv_mbx(MbxID_R,(T_MSG**)&pk_rcvmsg1,-1);
if(E_OK == ercd){
tm_putstring((UB*)"Task A have received return message: ");
tm_putstring((UB*)pk_rcvmsg->usrmsg);
tm_putstring((UB*)"Task A have received return message: ");
tm_putstring((UB*)pk_rcvmsg1->usrmsg);
}else{
tm_putstring((UB*)"Task A can't receive return message: \n");
PutErcd(ercd);
}
}
tm_putstring((UB*)"Task A will delete mailbox;\n");
tk_del_mbx(MbxID_S);
tk_del_mbx(MbxID_R);
tm_putstring((UB*)"Task A will terminate&delete task B;\n");
tk_ter_tsk(TaskID_B);
tk_del_tsk(TaskID_B);
tm_putstring((UB*)"Task A will terminate&delete self;\n");
tk_exd_tsk();
}
void MbxSampleTaskB(W stacd,VP exinf)
{
ER ercd;
U_MSG *pk_rcvmsg,*pk_rcvmsg1;
U_MSG sndmsg,sndmsg1;
for(;;){
tm_putstring((UB*)"Task B is waiting a message;\n");
ercd = tk_rcv_mbx(MbxID_S,(T_MSG**)&pk_rcvmsg,-1);
if(E_OK == ercd){
tm_putstring((UB*)"Task B have received the first message: ");
tm_putstring((UB*)pk_rcvmsg->usrmsg);
}else{
tm_putstring((UB*)"Task B can't receive a message: ");
PutErcd(ercd);
}
ercd = tk_rcv_mbx(MbxID_S,(T_MSG**)&pk_rcvmsg1,-1);
if(E_OK == ercd){
tm_putstring((UB*)"Task B have received the second message: ");
tm_putstring((UB*)pk_rcvmsg1->usrmsg);
}else{
tm_putstring((UB*)"Task B can't receive a message: ");
PutErcd(ercd);
}
sndmsg.msgpri = 10;
sndmsg.usrmsg = "I have got up...\n";
tm_putstring((UB*)"Task B return a message to Task A:");
tm_putstring((UB*)sndmsg.usrmsg);
tm_putstring((UB*)"\n");
ercd = tk_snd_mbx(MbxID_R,(T_MSG*)&sndmsg);
if(E_OK != ercd){
tm_putstring((UB*)"Task B can't return a message;\n");
PutErcd(ercd);
}
sndmsg.msgpri = 9;
sndmsg1.usrmsg = "ÒѾÔÚÔËÐÐÁË...\n";
tm_putstring((UB*)"Task B return a message to Task A:");
tm_putstring((UB*)sndmsg1.usrmsg);
tm_putstring((UB*)"\n");
ercd = tk_snd_mbx(MbxID_R,(T_MSG*)&sndmsg1);
if(E_OK != ercd){
tm_putstring((UB*)"Task B can't return a message;\n");
PutErcd(ercd);
}
tk_wup_tsk (TaskID_A) ;
}
}
如果接收邮箱参数改为cmbx.mbxatr = TA_TPRI|TA_MFIFO;就能正常了,不过A无法接收优先级类型的消息了。

难道是优先级高的任务不能够从低优先级任务获取优先级类型的信息?百思不得其解,求大拿指点。
-----------------------------------------------------我是华丽的解答线---------------------------------------------------------------------
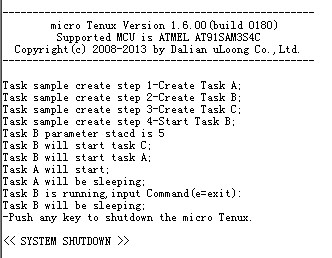
就在我决定关机的一瞬间,我发现问题所在鸟。
任务B第二条消息的优先级sndmsg.msgpri = 9;和第一条消息的参数一样,手欠啊,果断修改之。
世界清静了:
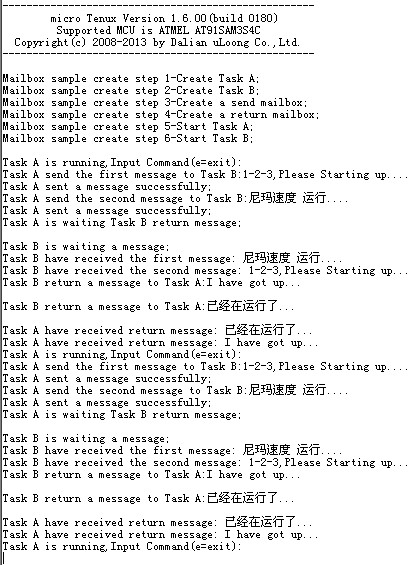
要小心啊,就少输入个1,一直折腾到现在。
实验四思考题
1) 如果把发送消息和反馈消息放在同一个邮箱中,如何实现?如果不能实现会出现什么样的状况?
不想做理论分析,直接修改代码做实验。
直接注释掉接收信箱的创建代码,发送和接受都使用MbxID_S。
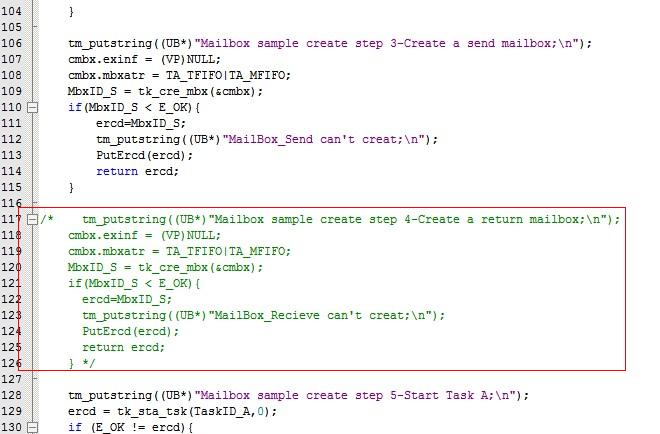
这个必须出问题,哇咔咔。
原来问题里面的状况是指,只有一个A任务在不断的循环,根本无法进入到任务B的循环中。
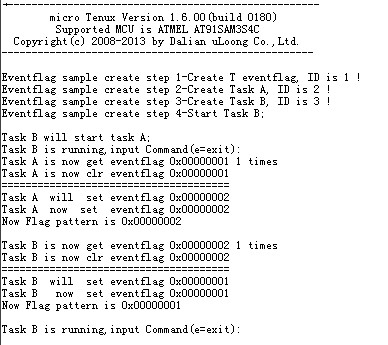
题目要求用一个邮箱完成收发,果断想到事件标志位,果断修改代码。
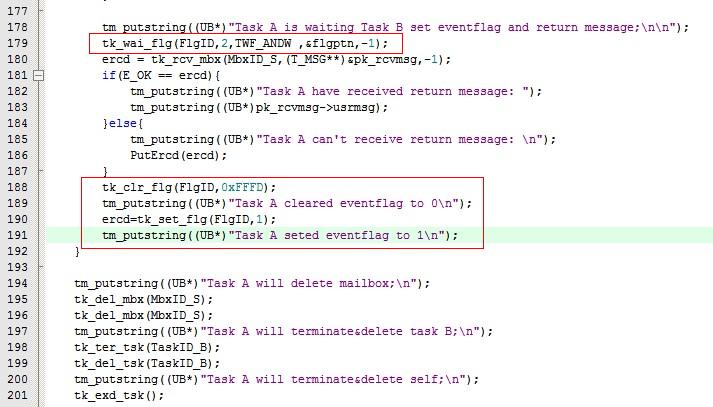
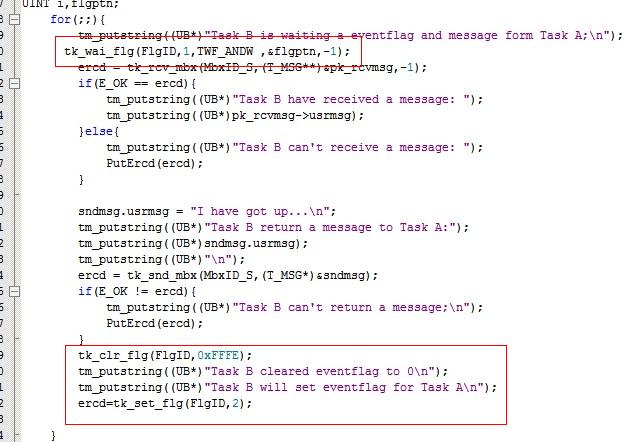
创建事件标志,分别设置A和B的标志操作,注释掉接收邮箱,仅用send邮箱完成massage的接受和发送任务,run......
原来一个邮箱就ok啦。
困,先码到这,TBC......

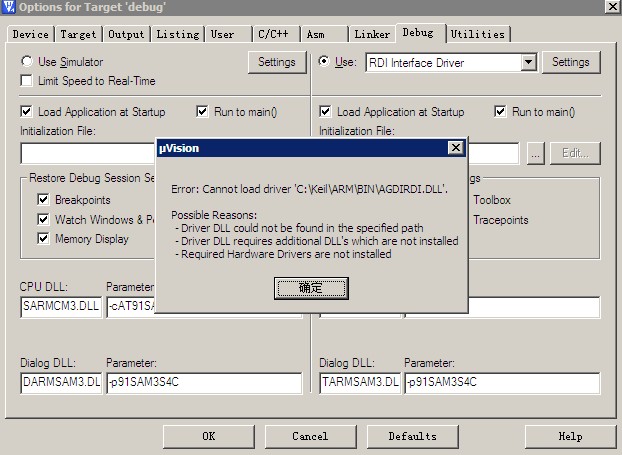


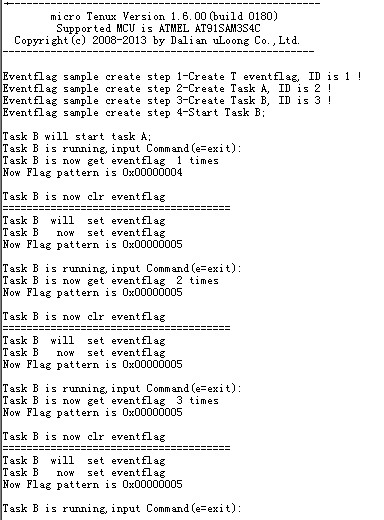
 编译,下载,却发现打印信息和预计的相差甚远。
编译,下载,却发现打印信息和预计的相差甚远。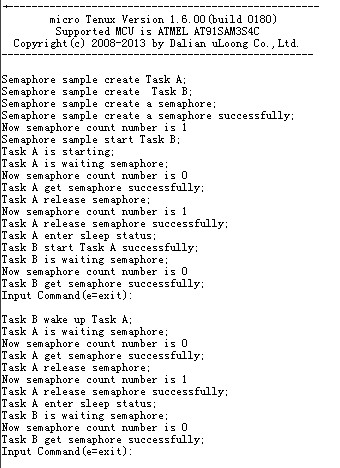

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

