
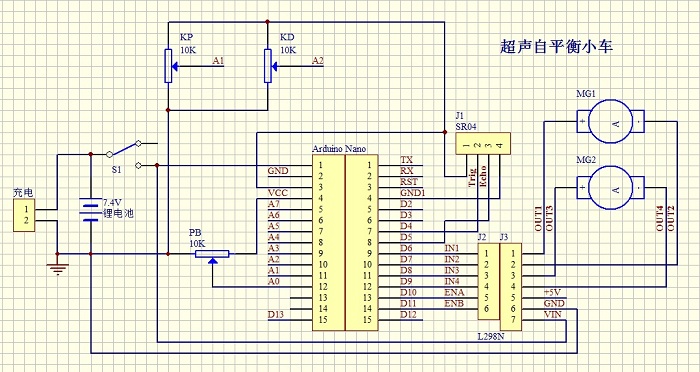
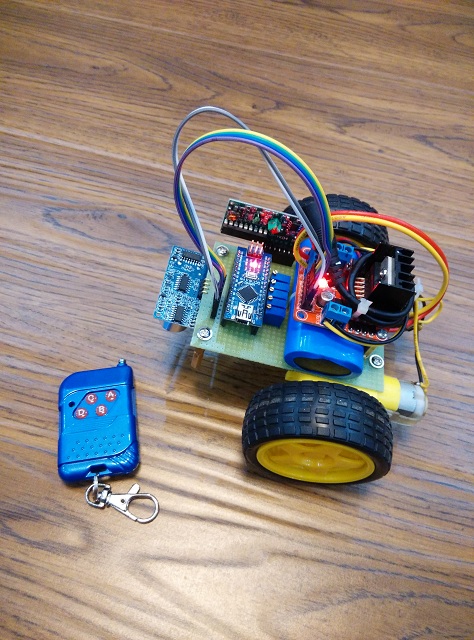
超声自平衡小车
1、项目概述(2楼)http://forum.eepw.com.cn/thread/268664/1#2
2、项目方案(2楼)http://forum.eepw.com.cn/thread/268664/1#2
3、硬件设计(3楼)http://forum.eepw.com.cn/thread/268664/1#3
4、器材采购(4楼)http://forum.eepw.com.cn/thread/268664/1#4
5、程序设计(8楼)http://forum.eepw.com.cn/thread/268664/1#8
6、调试流程(17、18楼)http://forum.eepw.com.cn/thread/268664/2#17
7、照片与视频展示(20楼)http://forum.eepw.com.cn/thread/268664/2#20
8、总结(21楼)http://forum.eepw.com.cn/thread/268664/3#21
9、后记(22楼)http://forum.eepw.com.cn/thread/268664/3#22
10、高档底盘的超声自平衡车(37楼)http://forum.eepw.com.cn/thread/268664/4#37
11、手机蓝牙控制蓝牙版超声自平衡小车(41楼)http://forum.eepw.com.cn/thread/268664/5#41
12、 手机蓝牙重力感应控制自平衡小车程序(42楼)http://forum.eepw.com.cn/thread/268664/5#42
超声自平衡小车QQ群:385432944










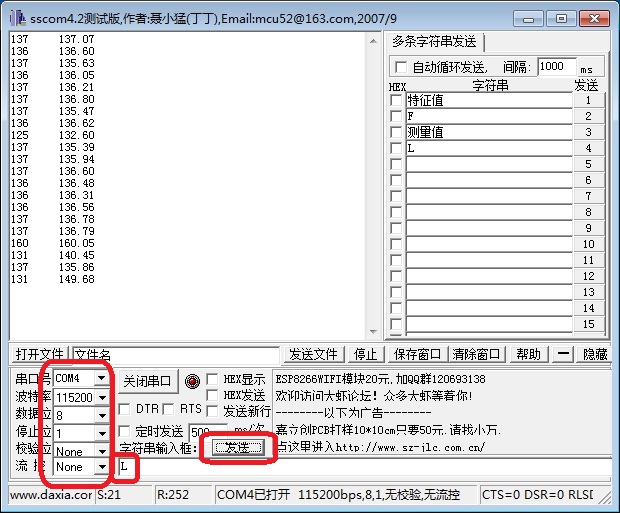
 第一个数据为平衡点设定值,第二个数据为Kp,第三个数据为Kd。
第一个数据为平衡点设定值,第二个数据为Kp,第三个数据为Kd。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

