
| 绘图型工艺品机器人制作经验 写于: 星期日 19 三月 @ 11:18:16 |
|||||||||
绘图型工艺品机器人制作经验 张皓(zh1110)
首先我信仰基督教,2个月前我连电子学还没有入门到现在的成果非常迅速,感谢上帝给我能造出这个机器手.其次也感谢同事冯给我的一些指导.
一个月前同事冯告诉我一些他以前参加机器人比赛的情况,我很感兴趣并有了制造机器人的打算,目的是设计一类通用机器人可以完成工艺家凿刻、折、绘图的手工劳动。因为绘图无需大电机力矩,所以首先着手此机器人开发。
下面就其机械,电子、软件控制分别介绍:
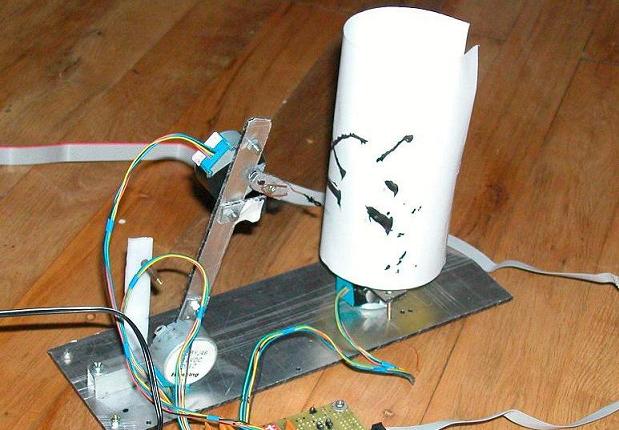
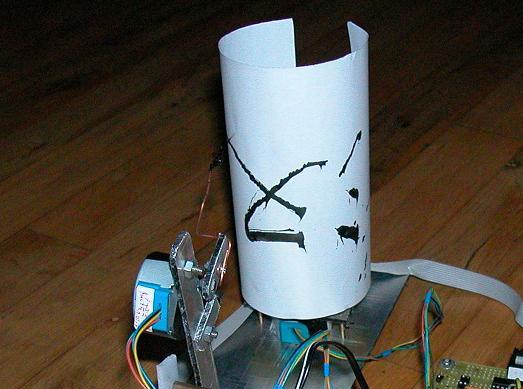
机械部分是在一块铝塑板平台上安置一旋转盘,盘上放纸桶。边上安装两关节的手臂,手臂由二个步进电机控制,平台由一个步进电机控制。末端手臂扎有用毛笔毛制成的笔,纸桶转动同时笔在纸桶边做上下运动,这样就在纸桶上绘上了笔画。大臂与平台有机械限位,在运行前归零用,小臂与大臂间也有同样限位.机器的各种尺寸参数在程序中设置成Const方便调整。
电子部分由三个步进电机专用驱动芯片驱动三电机,芯片的脉冲CP与正反转信号DIR由计算机并口(打印机口)输出。因为并口输出高电平电压为3.6V,而驱动芯片需要5V.所以用一片74HC244做缓冲、244还可防护计算机并口.VB不能控制打印机端口用虚拟设备驱动模块"WinIo.dll"输出(WinIo是动态安装的,但在VB编辑环境无法连接).
软件部分: 如此控制:用户先在绘图区随意涂抹,涂抹中鼠标按下时调用Maddline函数生成一条新直线,在鼠标移动的过程中坐标会加入到新直线的点数据中,数据可通过SaveRobotFile及LoadRobotFile函数保存到磁盘。绘制的直线数量是不定的,而每条直线中又包含许多点,所以自定义类型如下:
之后为了处理方便,直线数据要转化为相对简单的轨迹Trail()数据.其定义如下: Public Type Track '轨迹点类型 x1 As Single '伪3空间(模拟区)的点X坐标 End Type Dim Trail() As Track
现在已知笔在桶上的位置,又如何反算出电机角度呢? 我们通过第一张图很容易算出笔尖坐标为Length1-Length2/2,Length4+Length3'(如下),之后用直角三角函数算出C值. 再用三角函数C2=A2+B2-2*A*B*COS(a)算出电机1的上半角MoterAng1-a.以此方法就再算出电机1的下半角MoterAng1-b,电机2的角度MoterAng2.
程序中的几个主要全局变量与函数:
对于延时处理,VB自带的TIMER控件最快只能1/18秒触发一次,时间要求不高的场合可以使用这个控件.有的初学者喜欢用一个大的FOR循环,这也不妥当,因为不同电脑CPU速度不同而造成时间差异. 合适的方法是用WINAPI函数GetTickCount返回系统运行时间的时间(理论上达到毫秒级别). WINAPI还提供一个的函数QueryPerformanceCounter直接获取CPU周期,精度更可达微秒级别,但是使用它会降低系统性能.本系统即用此函数,用QueryPerformanceCounter获取CPU周期,QueryPerformanceFrequency取得CPU频率,两数相除即得到时间.
开始遇到的问题: 我在开始使用舵机+单片机作为系统,但经过实践发现舵机无法达到精度.不是单片机输出的脉宽精度不够,是舵机内的控制芯片只有3度左右精度.之后我使用了3个减速步进电机并放弃单片机,但步进电机用于小臂与旋转平台速度显的过慢,将其改造去除末级尼龙齿轮用电烙铁将前级齿轮与塑料转盘熔合就达到要求了. 还有一个问题是步进电机存在间隙在转向时发生误差有待解决.
手机拍摄的照片(点击大图):
|
共1条
1/1 1 跳转至页
绘图型工艺品机器人制作经验
只看楼主 1楼


关键词: 绘图型 工艺品 机器人 制作 经验 步进 电机 S
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

