
| 六足机器人(详细资料) 写于: 星期日 22 五月 @ 06:28:27 |
机械六脚昆虫
Part A: 设计工序
2.虚拟检查机械部分运转及可实现性 3.通过SOLIDWORKS输出图纸并加工(总工时大约2个月) Part B: 机械部分特点及运动原理
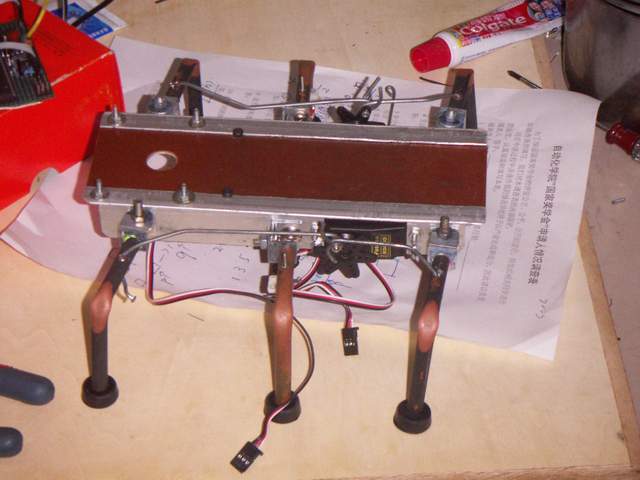
一共用了三个舵机,两个分别在两边,一个在中间,每一边的前腿和后腿是联动的,只有一个自由度,只能做前后移动;中间两条腿是联动的,只能做左右摆动。行走原理是:中间的舵机左右摆动,左中腿和右中腿交替着地,以使两边的腿分时产生推动身体向前的动作,即:左中腿着地时,右前腿和右后腿起作用,当右中腿着地时,左边前后两条腿起作用。中间的舵机在运动相位上始终与两边的腿相差90度;当左右两个舵机同相位时,机器人转弯;当左右两个舵机相位相差180度时,机器人前进或后腿
前进:第一步,5脚支撑并抬高4、6脚使其离地,同时2脚离地,1、3脚接触地面并并向后划动,实现了半步,接着2脚支撑并抬高1、3脚使其离地,同时5脚离地,4、6脚接触地面并向后划动。 机械部分控制与总控采取分离制度,一方面避免舵机工作产生大电流干扰总控,另一方面机械部分与总控部分分离,这样机械部分还可应用与其他场合。
//向后走,左右舵机初试值相同,半个周期中从后向前迈的脚(左)从 //向右走,左右舵机初始值相反,中间左脚先着地(0--10-0)(1600) //向左走,左右舵机初始值相反,中间右脚先着地(0-+10-0) //P1_0控制左舵机,P1_1控制右舵机,P1_2控制中间舵机 #include "AT89x51.h" void wahaha_int0(void) interrupt 0 using 1 void timer0(void) interrupt 1 using 1 void delay(unsigned char times) |
共1条
1/1 1 跳转至页
六足机器人
只看楼主 1楼


关键词: 六足 机器人 机械 舵机 控制
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

