
摘要:提出一种使用激光检测白底黑色跑道的寻迹智能车的软硬件设计方法,在硬件上设计了最小系统、主板、电机驱动、激光传感器模块、测速模块等电路,采用8位freescale单片机MC9S08AC16作为控制核心,使用低成本的红外传感器测速方案,采用14发射、7接收“-”字型排开的激光传感器检测赛道信息,电机驱动采用“H”型双极性驱动电路。硬件设计上使用了适合8位单片机的枚举查表为主的舵机控制算法,而速度控制则为bang-bang控制与P算法控制相结合的方法。
智能车竞速比赛以及多种智能车的应用场合中,需要智能车沿着某条轨迹快速前进,使用普通红外传感器、激光传感器、摄像头识别均可有效提取路面轨道信息而解决这一问题,现在常见使用16位单片机作为控制核心。普通红外传感器因为易受干扰、前瞻距离短等缺点已经较少使用,摄像头有丰富的数据信息,但是低成本8位单片机不能很好的处理这些信息。激光传感器成本适中,处理的信号便于8位单片机处理,能够有效的节省硬件成本。针对寻迹智能车进行了软硬件设计,采用3位freescale单片机MC9S08AC16作为控制核心,使用激光传感器提取赛道信息,采用低成本的红外测速方案,算法使用以PID为基础的枚举查表法,做到了处理快速高效。整个设计既满足了竞速小车的响应迅速的要求,又是一种较低成本的设计方案。
1 车模安装
智能车的控制采用的是前轮转向,B型车模采用的是国内厂商生产的1:16的电动越野遥控车的底盘部分,突出特点为四轮驱动,四轮独立悬挂。反射式光电传感器在小车前方一字形简单排布,14个发射,7个接收,一个发射带两个接收,传感器的前瞻可以达到40cm以上,两个激光发射头间距1.8cm.传感器单元安装图如图1所示。
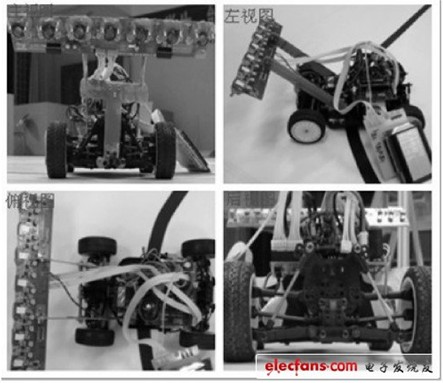
图1 改装后智能车
系统选用红外传感器作为测速传感器把红外传感器安装在后轮上,在后轮的内壁贴上黑白等距的胶带,这样子安装就充分利用了空间,且完成了测速的要求。红外传感器测速安装图如图2所示。车轮转动时,红外传感器将会输出脉冲电平,检测脉冲频率将得到小车速度。这种测速方法无法达到光电解码器的精度,但是对于小车的速度处理并没有太大影响,而光电解码器价格昂贵,安装在齿轮上,同等电源和PWM的输出时,小车速度会变慢。
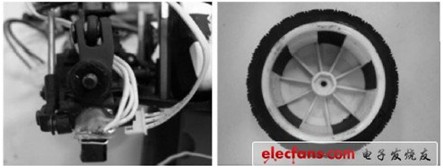
图2 红外传感器测速的安装
2 硬件设计
电源管理模块采用7.2 V 2 000 mAh Ni-Cd蓄电池作为系统能源,并且通过降压稳压电路分出6 V,5 V分别给舵机和单片机等供电;使用H桥及其相关器件做了直流电机驱动模块;转向伺服舵机控制智能车转向;用红外传感器测量模块实时测量智能车车速;采用激光传感器作为赛道的检测;系统充分使用了M9S8AC16CG单片机的外围模块,具体使用到的模块包括:定时器模块、PWM脉冲宽度调制模块、中断模块、I/O端口和实时时钟模块等。
2.1 最小系统及主板
系统采用的常规使用的最小系统板,以MC9S08AC16为核心的单片机系统的最小系统主要包括以下几个部分:时钟电路(外接的8 MHz的石英晶振)、电源电路(提供5 V直流电源)、复位电路、BDM接口(通过BDM头向单片机下载和调试程序)。
主板上有组成本系统的主要电路,具体包括:
电源稳压电路 7.2 V的电池电源将会通过3个集成稳压电路处理成两个5 V、一个约5~7.2 V的可调直流输出,其中一个5 V直流电源供单片机和相关外设工作,另外一个5V直流单独供激光传感器工作,可调直流输出供舵机工作,采用这种电源设计方式,可以提供所需不同大小的电源,同时在舵机、激光传感器工作时不会影响单片机的工作电源。
接口电路 包括舵机接口、电机驱动接口、电源接口、调试用人机界面电路接口、单片机最小系统插座。
电机驱动板作为一个独立的单元制作的直流电机“H”型双极性驱动电路。
2.2 传感器模块
采用14个发射,7个接收,两个发射一个接收为一组一字排开。每次选中不相邻两个发射管发射,由两个接收譬分别接受。AC16单片机的IO端口进行控制,由74LD164驱动选择要发射的传感器,由一个555芯片发出100 kHz的频率震荡波,激光管发光。接受部分有一个相匹配的100 kHz的接收管接收返回的光,7路接收管的接收信号直接进单片机。传感器原理如图3所示。
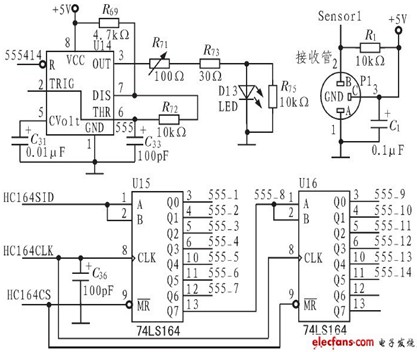
图3 激光传感器原理图
3 软件设计
3.1 软件设计概要
系统的主函数将执行图4所示流程图对应的程序。调试程序可以完成的功能有:检验传感器故障、调试速度控制参数、舵机中点设置、舵机转角参数控制等。传感器数据的读取特指激光传感器的读取,在定时器程序中,每5 ms开始新的一轮激光扫描,每125μs更换1组激光发射管,每组发射两个不相邻的激光信号,所有激光发射5遍之后,3次以上检测到赛道轨迹信号才确认有效,此时才会设置传感器数据读取完成标志,所以系统每5 ms进入后续程序执行。小车舵机转向控制、速度控制稍后详细论述。对于小车马达速度控制则为闭环控制,采用bang-bang控制与P算法控制相结合,小车的速度读取采用了输入捕捉功能完成,车子运动时,车轮转动,每转过1/5圈,红外传感器就会输出一个完整的脉冲周期,通过读取红外传感器的输出脉冲频率确定小车的速度。

图4 软件设计流程图
3.2 小车行驶状态确定
该系统采用的赛道为宽为50 cm,中心线为25 mm的赛道,传感器在黑色上读取为1,在白色上读取为0,赛道外地板使用传感器有可能读1,也有可能读0.激光传感器终采用“一”字型排布方式,相邻的两个传感器的距离为20 mm.赛道如图5所示。
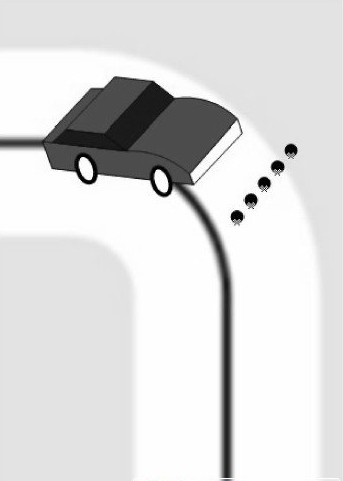
图5 赛道示意
传感器在赛道上可能的状态可分为:在普通的赛道处、在十字交叉线处,还有跑出赛道。系统定义了变量Car_State来代表小车当前的状态,可能会出现的情况如下:
1)当小车在赛道上时,将会有1到2个传感器输出高电平,如果有两个传感器同时打到黑点,而两个传感器并不是相邻的则认为是干扰信号,不作特别处理,其他按照如图6的传感器排布方法计算坐标从左向右依次为-13到13,此时Car_State计为传感器打到的坐标;
2)打到10个以上黑点计为交叉线,Car_State计为20;
3)没有打到黑点则认为小车即将跑出赛道,Car_State计为30;
4)另外还有一种情况传感器已经打到了赛道之外,而打到赛道外的传感器可能输出高电平,也有可能输出低电平,此时有可能读出的情况可能会判定为第一种,如图5示意,此时小车本应继续左拐,但是判读位第一种情况,就可能右拐,这种情况的判定就不能仅仅依靠读传感器来判定,还应考虑小车前面行进的趋势加以判别。因为此种情况一般只出现在小车转大弯时,由于转角不够当小车的传感器会打到相反方向的赛道外,所以左转或者右转的角度超过某一特定值时(如60°),应当屏蔽另一侧的传感器,只读转向该侧的传感器,如图5小车现转左侧大弯,右侧传感器检测到错误黑点,此时只要将右侧的7个传感器屏蔽,只读左侧传感器数值即可,此种情况Car_State计为40。

图6 传感器排布
3.3 舵机控制
小车在赛道上:Car_State为-13到13间的整数,由于光电管数量少,造成传感器返回值离散度过大,不适合进行回控,故应加快采样速率,进行过采样,再进行一阶迭代滤波:
PVal=((Car_State×1 000)+(Pvalx10))/11;
小车行使5 ms后位置的偏差进行迭代滤波:
Err=((PVal-PVal1)+(Errx10))/11;//两次位置偏差
P_Offset=Err/P_err; //负值左偏 正值右偏
if(P_Offset《-5)P_Offset=-5; //左偏最大偏离为-5个单位
if(P_Offset》5)P_Offset=5; //右偏最大偏离为5个单位
将Err进行采样划分得到P_Offset变量,P_Offset取值为-5到5的整数,负数表示向左偏,正数表示向右偏,绝对值越大代表偏转角度越大;采样分辨率为可调参数P_err,P_err偏大时,小车反应会较为迟钝,P_err偏小时,小车反应会较为灵敏,容易出现很小偏差就会引起小车较大的转向。
按照小车当前的位置以及P_Offset组织数据表Angle_Table[],该表共有27行11列,第n行m列元素j,表示小车位置Car_State为n-13偏差P_Offset为m-5时,j的值在-10到10之间,负值代表向左转,正值代表向右转,小车舵机应打的角度为jxAngle_C,可调参数Angle_C可以根据赛道状况舵机反应灵敏度等调节,其调节在调试程序中完成,其值愈大,同等情况下转角越大。
舵机的控制就是通过查数据表Angle_Table来实现,而不是通过公式求解,这种方法比较适用于8位单片机,通过检索表可以达到运算所达不到的系统速度。
小车在交叉线时Car_State=20不更改舵机的控制;当小车的传感器打不到黑点,即将跑出赛道活着已经打到赛道外时Car_State=30或40,此时按照小车转的方向,将舵机设置为最大转角,以达到尽快找到赛道黑线的目的。
舵机的输出PWM采用5 ms周期,与小车传感器采样的频率一致。
4 试验结果及总结
通过上述方法,小车取得了比较好的试验结果,在最小曲率半径不小于50 cm的赛道上,小车可以取得每秒2 m以上的速度。其速度比采用16位单片机的系统没有很大差异。要特别注意的是,运算时采用不同数据类型的变量将会带来不同的效果,经实验证明,如果可以使用字节存储类型的变量作双字节变量存储,将会严重影响小车的运行情况,这是由单片机编译环境进行数学运算引起的,应当尽量避免不恰当的变量定义及算数运算。
相较于当前流行的16位单片机控制的双舵机智能车,该系统在硬件上成本较低,而软件也根据8位单片机的特点,避开了较为复杂的运算,采用了查表的方式,只在小车位置及偏差运算以及速度P算法中涉及了少量的数学运算,以此达到系统的快速响应。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

