用来控制自动行驶和队列行驶的装置“FS-ECU”也为了确保安全性,配备了两套系统(图6)。不仅安装了两块控制用基板,而且控制基板的CPU内核也配备了两个,增加了CPU内核之间可相互监控计算结果的故障安全功能。比较电路采用FPGA。
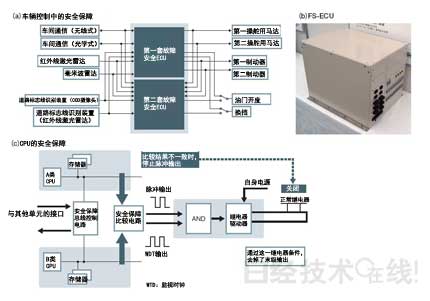
图6 彻底确保故障安全
试制的系统彻底确保了故障安全(a)。传感器及用于控制的ECU也采用了两套系统。开发出了配备两块控制基板的“FS-ECU”,基板的CPU实现了双重化。CPU利用比较电路实时进行状态监控(c)。(图:《日经电子》根据NEDO的资料绘制)
FC-ECU的控制方法参考了构建高可靠性系统的铁路车辆控制装置的思路。铁路车辆能够根据来自自动列车控制装置(ATC)等的控制信号,自动调整车辆速度等,此次便利用了这种原理。因此,FS-ECU由从事铁路车辆控制装置业务的日本大同信号公司负责开发注1)。
注1)FS-ECU及传感器的长期可靠性评估由东京大学生产技术研究所负责。东京大学、大同
信号、电装、弘前大学共同在宇部兴产设在山口县的汽车专用道(宇部~美祢,单程:约30km)上实施了实地试验。另外,电装负责开发使用红外线激光雷达的
道路标志线识别功能,弘前大学负责开发采用摄像头的道路标志线识别功能。
实际行驶时,除了上述各种传感器提供的信息之外,还使用了地图数据。领头车辆根据地图数据、前方识别及道路标志线识别结果自动行驶。后方车辆则在利用传感器识别前方车辆的同时,通过车间通信,以20ms的通信周期获取领头车辆的速度等信息。
尽管4米车距演示时无法登车随行,但在车距扩大至10米的队列行驶时记者可以随行。10米车距演示的内容是,使用三辆大型卡车,在实现自动
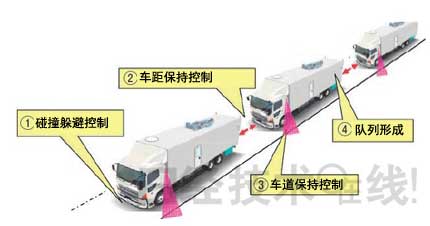
驾驶的同时,让领头车辆检测前方的低速车辆并追踪其速度。实施了从80km时速降至60km的追踪,以及从80km降至30km的追踪两种演示(图7)。
而且,还进行了发现障碍物后通过紧急制动来避免碰撞的演示,以及领头车辆不采用自动驾驶,当驾驶员操作车辆横跨道路标志线驾驶时,后方车辆追随前方车辆的
追踪控制演示。

图7 保持10米车距进行队列行驶
在此次演示中,3辆卡车以80km时速、10米车距进行队列行驶时,可以登车随行。进行了自动追踪低速车的演示。
还公开了简易版系统
此外,为了推动技术的通用化,尽早将自动列队行驶投入实用,NEDO把车间通信、基于前方识别技术的车距控制,以及前方障碍物识别技术应用
到了日本四家卡车厂商(五十铃汽车、日野汽车、三菱扶桑卡客车、优迪卡)的大型卡车中。这些车辆需要驾驶员控制方向盘,但领头车辆利用可追踪前方车辆的
“自动巡航控制(ACC)”系统来行驶,而后方车辆可一边控制车距一边进行简易的队列行驶。
NEDO此次进行了车距为30米的队列行驶演示(图8)。内容包括,对前方低速车辆进行速度追踪、发现障碍物时的紧急制动,以及在乘用车切入第二辆与第三辆之间时将车距控制切换为通常的ACC。(记者:狩集 浩志,《日经电子》)

图8 车距为30米的简易队列行驶
演示了车间通信、基于前方识别技术的车距控制、采用前方障碍物识别技术的简易系统队列行驶。尽管需要驾驶员操作方向盘,但可以自动保持车距。







 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

