
作者:山东大学 陆梓嘉 朱亚军 崔嵩
指导教师:李振华 孙波
作品简介
第1章 引言 1.1 概述
智能车以汽车电子为背景,涵盖了控制、模式识别、传感技术、计算机、
机械等学科,具有自动行驶,自动变速,自动识别道路的功能。世界各国都在
智能车的领域进行了大量的研究。
全国大学生智能汽车比赛也就是在这个大的背景下开展的。全国大学生智
能车比赛由全国高等教育司研究,委托高等学校自动化专业教学指导分委会主
办的,旨在培养创新精神、协作精神,提高工程实践能力的科技活动。
今年“第五届”全国大学生智能车大赛在以往光电和摄像头的基础上新增
了电磁组的比赛。我们山东大学风之舞者队在华北赛上表现优秀,最终获得一
等奖并顺利进入全国赛。
“第五届”全国大学智能车比赛新增加的电磁组要求在组委会提供统一智
能车竞赛车模(A 型车模)、统一的电磁电源、统一的飞思卡尔单片机、开发软
件CodeWarrior 和在线调试工具的基础上制作一个能够自主识别路线的智能车,
它将在专门设计的跑道上自动识别道路行驶。中心目标是不违反大赛规则的情
况下以最短时间完成单圈赛道。
本技术报告主要对比赛车模整体设计思路,硬件与软件设计及车模的硬件
装配调试过程作简要的说明。赛车车模使用飞思卡尔MC9S12XS128MAL 单片
机作小车控制核心和一款四轮的带有差速器的后轮驱动模型赛车作为智能小车
基本载体。车模中采用10mH 电感对赛道内磁场进行测量,并通过控制策略使
小车平稳快速的跑完赛道全程。运动策略的制定主要是依靠对传感器得到的道
路及行驶信息进行采集、分析、决策、执行四个步骤来进行的。车模和赛道如
图1-1。
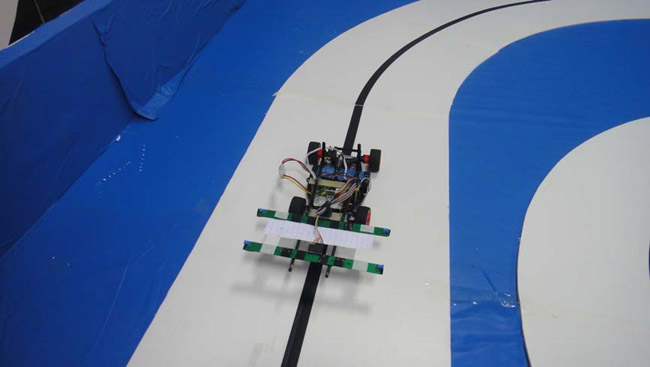
图1-1 车模与赛道
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

