
作者:上海第二工业大学 海浩 陈治龙 石林燕
指导教师:杨冠群
作品简介
摘要
第六届“飞思卡尔杯”全国大学生智能汽车竞赛规定参赛选手须使用竞赛秘书处统一指定并负责采购竞赛车模套件,采用飞思卡尔半导体公司的8位、16位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、动力电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试。大赛分光电、摄像头、电磁三个赛题组。本组设计的智能小车是基于激光传感器的,属于光电赛题组。
本组的技术报告以智能小车的设计为主线,包括小车的构架设计、软硬件设计,以及控制算法研究等,分为六章。其中,第一章为引言部分;第二章主要介绍了小车的总体设计;第三章对小车的硬件设计进行了详细的介绍,其中包括机械改造,电路设计两大部分;第四章描述了小车的软件设计和相关算法;第五章对开发工具、制作、安装、调试过程说明,以及模型小车的技术参数说明;第六章叙述了设计的总结和展望。附录A为整体电路的PCB板,附录B为程序源代码。
第二章 智能小车设计分析
2.1 设计要求
本次竞赛中,要求所设计的小车具有自动寻迹功能,以起始线为计时点,在赛道上高速、稳定地跑完一圈后,赛车需要自动停在起始线之后三米内的赛道上。赛道为白底黑线,白底宽50cm,黑线宽25mm 5mm,比赛允许选手自行设计传感器和控制电路,并编写控制程序,禁止改动舵机和轮胎等小车结构。
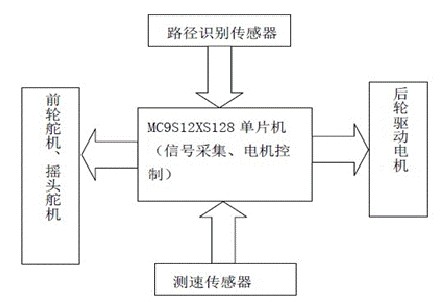
2.2 总体设计
系统框架如图2.1所示:
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

