
今年暑假前抽了个空(你们懂的),和一个学长一起去了上海看的2014CIROS博览会,做了一个小总结,主要是学长执笔,我修改了一些,权当一个结束吧。 下篇:http://forum.eepw.com.cn/thread/259558/1
源文件下载:2014CIROS.pdf
部分视频:
视频地址:http://player.youku.com/player.php/sid/XNzU0NjIyMTQw/v.swf
2014 上海CIROS参观的 部分视频,依次为 柯马的点焊机器人、史陶比尔的串联快速移动机器人、川崎的汽车组装流水线、那智不二越的打磨机器人、辰星的并联机器人玩七巧板、intelway的机械臂弹钢琴(欢乐颂?)、以及乐博士的大四轴演示。
0参观指南
1参展商花名册
0.0展会官网 http://www.ciros.com.cn/
0.1参观指南
1, 参展商花名册, 共四张图
2,参观照片,
2.1每张图下面并附有了一些文字说明,以及部分吐槽。
2.2 More更多
这一部分的文字主要是通过阅读展商宣传资料,从中摘出的重要部分,以及部分自问自答。因为个人做这次整理完全本着学习的态度而做,无他。


1, 参展商花名册
我为什么贴上这些机器人展商花名册?
1),我们应当了解到,在中国还是有很多机器人相关的企业和公司的。所以,在提到机器人的时候,我们不能再仅局限于发那科、安川、ABB、库卡、柯马、OTC、川崎、那智不二越、松下等世界一二线品牌厂商 http://www.zhihu.com/question/19826366 。我们应当知道,在中国也有很多人在做机器人相关的事情,虽然他们的技术还不够成熟,或者有意或无意地在模仿一些经典作品。
2),希望给自己的实习或者工作多条路可选择。
当然,有些非常牛叉的毕业生他们能很容易进入一二线机器人企业;但对于我们等普通人来讲,又不想放弃做机器人相关技术——这一点我觉得好难能可贵啊。所以,多了解下多数普通中国企业,至少可以作为一个入门,或者是短期实习的选择吧。
哈哈,我就想吐槽了。两个月前,我觉得自己的暑假较为轻松,想投一家机器人相关企业进行暑期实习,当然后来又差不多确定了研究生大方向为飞行机器人。然后开始查国内跟飞行机器人有关的企业,最后只查到了一个:深圳大疆。第一次听说,然后看到网上的相关信息,甚至有利益相关者进行献身说法,觉得大疆完全“吊炸天”啊。之后,楼主Z忧心忡忡地向他家的HR投了一封实习的简历,最后,最后,只能石沉大海,杳无音讯了。
最近听说小伙伴有人参加深圳大疆举办的机器人竞赛,真心祝愿小伙伴取得惊喜的成绩。
(展商名单见附件)
===========================我是昏割线=======================
正文:

优傲的机器人,最大特点就是这个外表了,不似一般的机器人那么冷冰冰的。这个据介绍是做人机合作的,主要是安全,当检测到撞击时,立刻停机。不过我问他,如果区分人的撞击和负载的时候,他也没有回答出来。

这就是NAO机器人了,底层全部写好,给命令就行,估计那些跳舞的机器人都是这么做的吧
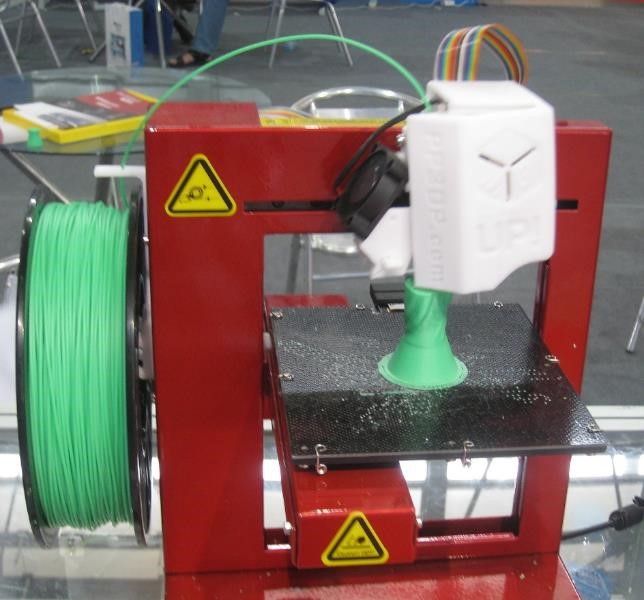
一家公司正在进行3D打印的机器人。
下面的橱窗里有更多的3D打印工艺品,非常漂亮。但是材料还仅限于上面看到的软管。我想如果想扩大3D打印的应用场景。除三自由度的控制之外,还得更多地考虑跟材料相关的因素吧。

该为毕孚自动化设备贸易(上海)有限公司的磁悬浮输送带模型。
我第一眼看上去的时候,完全没有看懂这是什么,只是观察到这个弧形和矩形的边缘上有许多的金属块在快速移动,是在不明白是干什么用的。
后来,工作人员介绍说,这是根据磁悬浮的原理设计的磁悬浮输送带,使用的斥力来悬浮物体。
个人觉得思路非常新颖,非常赞的设计。至于优点,这个可以参考 http://www.hgj-cn.com/news/n252.html 。


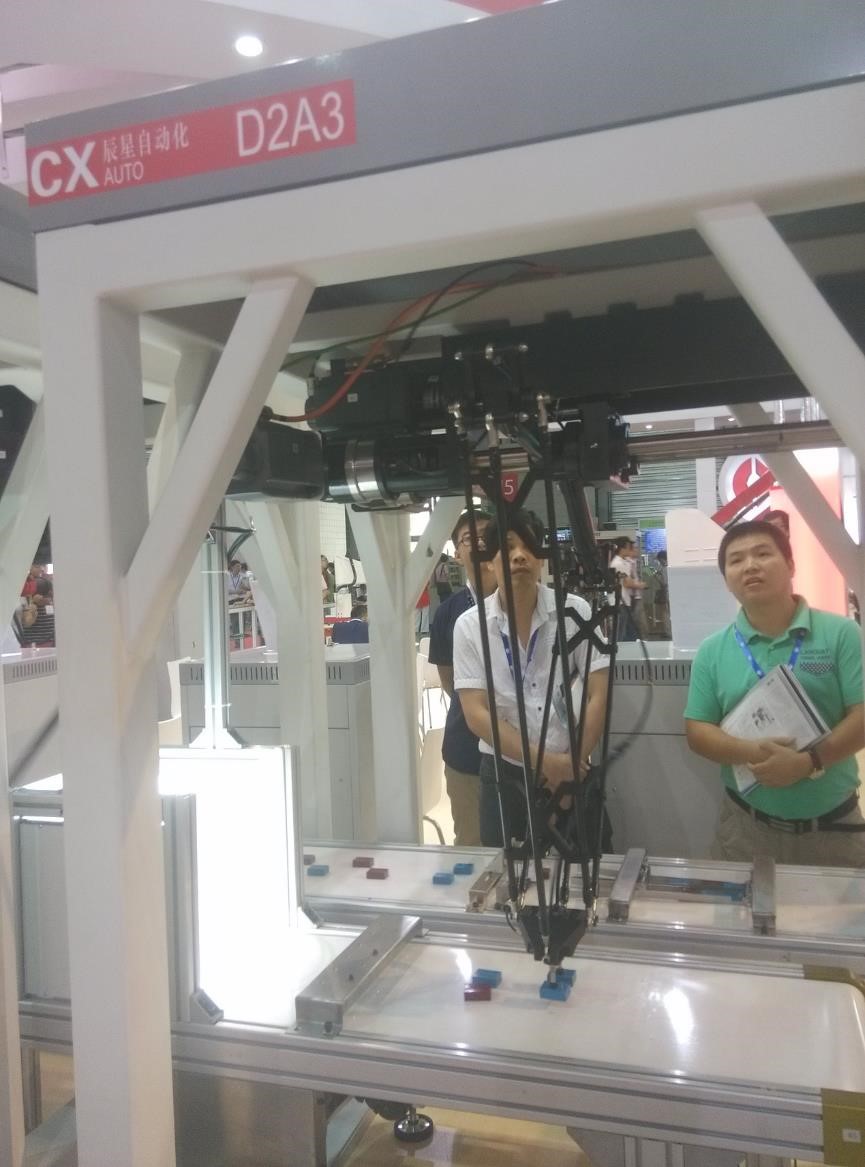
该为深圳创银鑫科技有限公司的可移动并联式机器手臂。
http://www.hiwincyx.com/product_details.php?id=134
仅从末端所能够执行的路线来看,和一般的Delta机器人无异。但其三个连杆的动力来自于安置在支架上的三个直线移动导轨。这个思路就是非常赞的。
对比了同展出的其他家类似产品,该款产品的优点是,控制精度高,本体重量较轻。


该为上海新世纪机器人有限公司的产品 http://www.i-robot.com.cn/ 。
这种车型的思路貌似已经流传了很久,但是如此真实、炫、时尚的车子能创造出来,觉得还是相当赞的,而且我觉得市场价格也是很亲民的。现场可以看到工作人员在流畅地运行,并想观众们展示车子的完美性能。
只可惜,工作人员不让现场体验。估计是得有一定的学习成本。

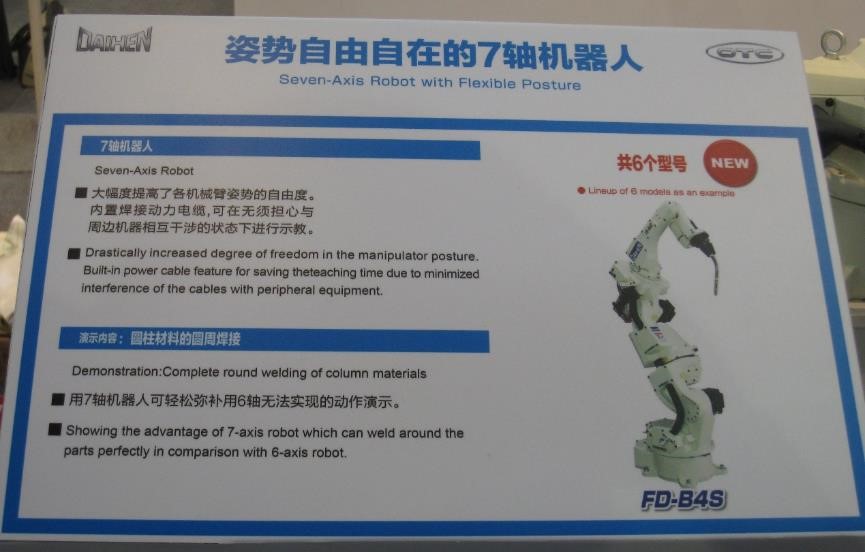
这是OTC的七自由度串联机械臂。
在我的认识里,机器人具有六自由度就已经完全足够了,为什么此处还非得设计成七自由度呢 ?
我笼统地觉得是两点:1,相对于六自由度提供一种冗余;2,工作空间更加灵活,克服一定的工作死区。工作死区很容易通过机器人的工作范围二视图看得出。
经工作人员的解释,加之上面第一二两张图的直观感受——其中所显示的拐角焊接,能够看得出这种七自由度所带来的自由程度。
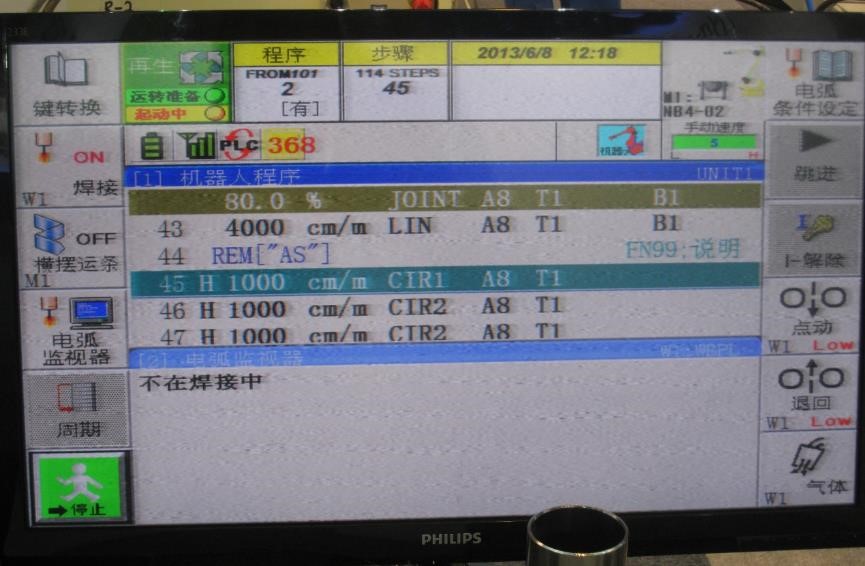
该图为OTC七自由度机器人的软件程序图,改程序在实时地运行当中。整体印象还是很简洁明白的。

该为OTC机器人双机协作实现了搬运的功能。

该为EFORT机器人同步协同完成了搬运的任务。 两个机械臂协作在空间中移动底板,第三个机械臂顶部安装了一根金属棒,跟踪易拉罐的边缘轨迹。

该为EFORT机器人双机协作进行按摩。
看到正中间的黑色方盒盒了吗?那竟然是微软的Kinect。在该展馆中我不止一次地看到Kinect的身影。反正我只知道这个东西不便宜。
此处的按摩机器人,我也是不敢尝试的。看到两个有角有楞的机器人,其透露的冰冷早把我吓跑了。而且看到机械臂的动作还是比较僵硬的。
而且,我觉得用这样两个大家伙,外加上一个高大上的Kinect,竟然只是为了完成按摩,这也太有点大材小用了吧。我甚至觉得这是展商为了吸引观众的噱头。

该为EFORT机器人,正辅助纺织机床和工作人员完成从纱到布,再到衣的复杂工作。该机器人在工作人员面前“毕恭毕敬”、“轻柔的”动作,倒让我觉得它像是一个温顺的仆人——但它“骨子里”要硬多了。
More 更多
材料中提到:采用IPC、实时以太网,实时系统的机器人控制系统。
何为IPC?
应该是Industrial Personal Computer,工业个人计算机,更多特点参考
http://baike.baidu.com/view/373.htm?fr=aladdin


该为埃斯顿机器人结合数控机床完成打磨模具的工作。

该为埃斯顿搬运机器人完成搬运重物的动作,其采用的机械手进行“抓取”的方式。同在展馆中,还见到用真空夹具进行“吸取”的。此时,我觉得反而是这种方式更方便一些。至少可以出去真空系统的设备,而且这部分设备对气路要求非常高,较难维护。当然,在实际的应用当中还要考虑更多因素,在搬运普通编织袋(不用担心损坏的情况)时这种方法效果更高。
值得一提的是,其所配套的输送带上,并不是每个部分都用的圆柱型导轨输送,有一部分竟然用的是正方形形导轨。仔细观察才发现:每次抓取过后,袋中的物料都会集中在中间,经过正方形导轨的震荡,可以变得比较均匀,便于堆叠存放。我觉得这个细节设计很赞。

该为爱乐驰的关节式工业机器人,较好地跟踪了规定的轨迹,包括圆弧和直线。
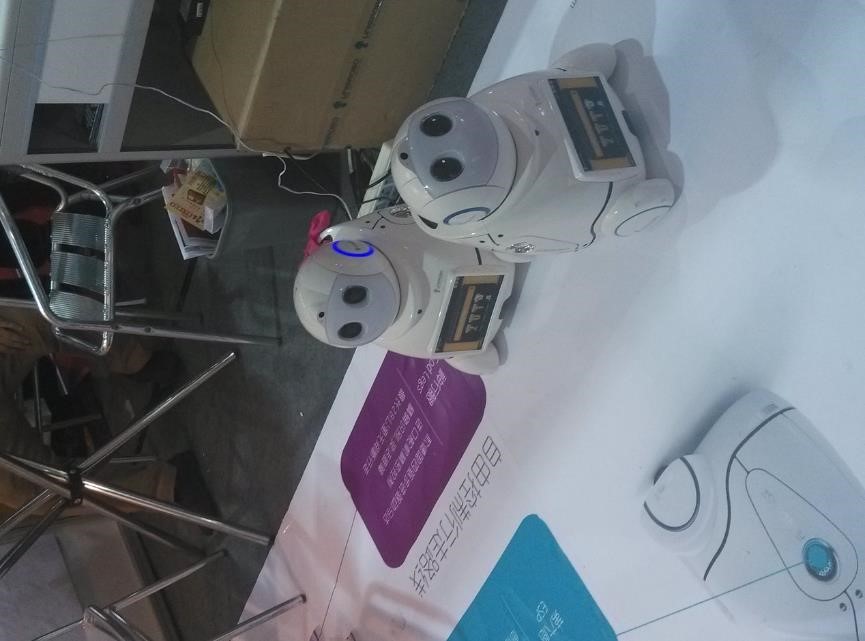
该为爱乐优的家用智能机器人,产品详情可参考百度百科 。
人工智能做得还不是很好,比较僵硬,离想象中的智能家居服务还有很大距离。不过这个作品的尝试以及填补市场空白方面还是值得称赞的。


安川机器人结合数控机床完成打磨工具的工作任务。


安川机器人完成搬运和码垛的工作任务。
因为搬运的重物表面较为光洁,该机器人使用的真空吸盘的抓取方式,同为侧边有夹具防止搬运物的侧向滑动。
基本上,每次都是搬运两箱重物。但在搬运的过程中,可能存在最后的两箱物体在同一层,但是并不靠近,无法一次同时吸取,这时候就会发现,机器人较为“智能地”先把两箱重物放在临近,然后再一起搬运。仔细观察,并没有发现摄像头,应当是人为编程实现的。

该为安川的类人机器人正在拼魔方。这个肯定是有视觉作为辅助的,加上玩魔方的一些公式,完成这个人为应该是不难的。该机器人只显示了能完成魔方还原,并没有特别突出其速度。


该为哈工大做的残疾人假手。
当时去的时候正值饭点,相关工作人员不在,一直没看明白怎么用的。
仔细瞧瞧有摄像头吗?我想,一定是有的。


该为川崎的三台并联机器人正在分拣骰子,分成六组装入六个不同的盒子里。现场观察效果还是相当不错的,而且速度可以。
仔细观察,该套系统仅在第一台并联机器人的前面安装了一个摄像头。这就必须保证,过了摄像头区域的任何骰子只能以输送带上以已知的速度平稳运动,绝不允许任何原因带来的扰动,因为之后的任何扰动都是系统不可知的。比如第一台机器人抓取固定骰子时,不能将其他骰子移动。
所以个人觉得系统还不够完美,当向工作人员请教为什么不多用几个摄像头时,他回答是一个摄像头已经足够了。“足够”也许只是说满足了95%这样的要求了,然后我们都亲眼见证了一个骰子愣是大摇大摆走过三台并联机器人,成了漏网之鱼。
后来用着相同的思路再想了想,即使再加上一个摄像头,甚至是两个,也只能是从95%提高到99%,甚至是99.99%,也绝对无法保证一定完美100%。我想,这就是它们所说的“足够”了吧。



该为十几台川崎机器人协作完成汽车的组装任务。现场感受气势很庞大。
可以说在该展馆中,川崎是真正的土豪。当然后面还有假土豪。
More 更多:
1,文案中提到“通过使用标准配备的机器人AS语言,可以实现高精度的动作控制盒时序控制”。

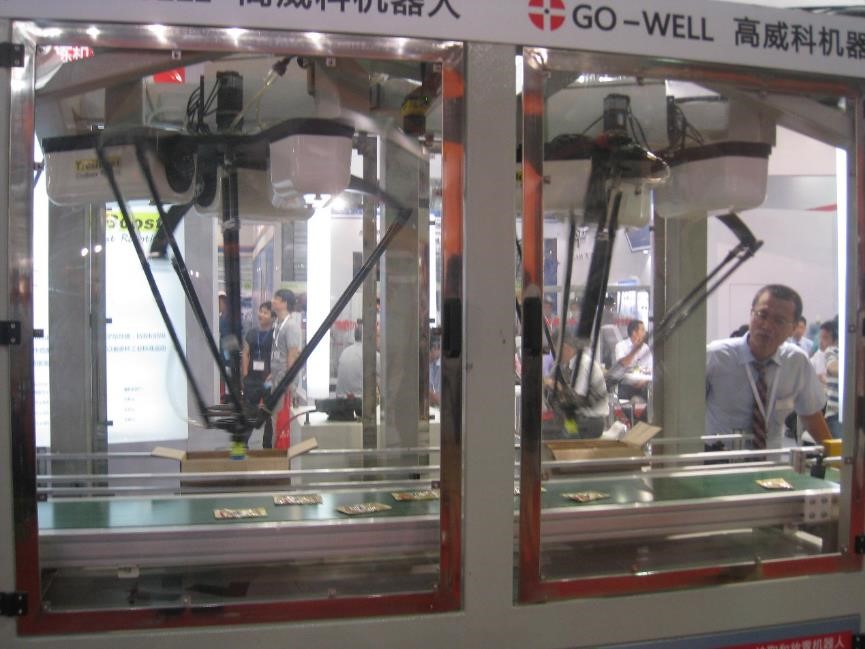
该为高威科并联机器人完成食品包装袋分拣装箱工作。因为一般的食品包装可抗一定冲击,所以吸盘的动作也较大,不过确实在允许的范围里得到了很高的效率。

该为广州数控八轴联动焊接机器人,为什么是八轴?难道比七自由度还牛逼?(应该是有备份之类的吧)
More 更多
1,文案中提到“采用17位绝对式高速、高精度光电编码器,与高性能驱动单元配合可作为高精度控制,该绝对编码器提供电机绝对数据位置,不需要电池供电,永久保存,不需要每次开机时做原点复位”。
2,提到“嵌入式机器人控制器:基于ARM+DSP+FPGA硬件结构”。
从中多少偷窥到了硬件学习的方向

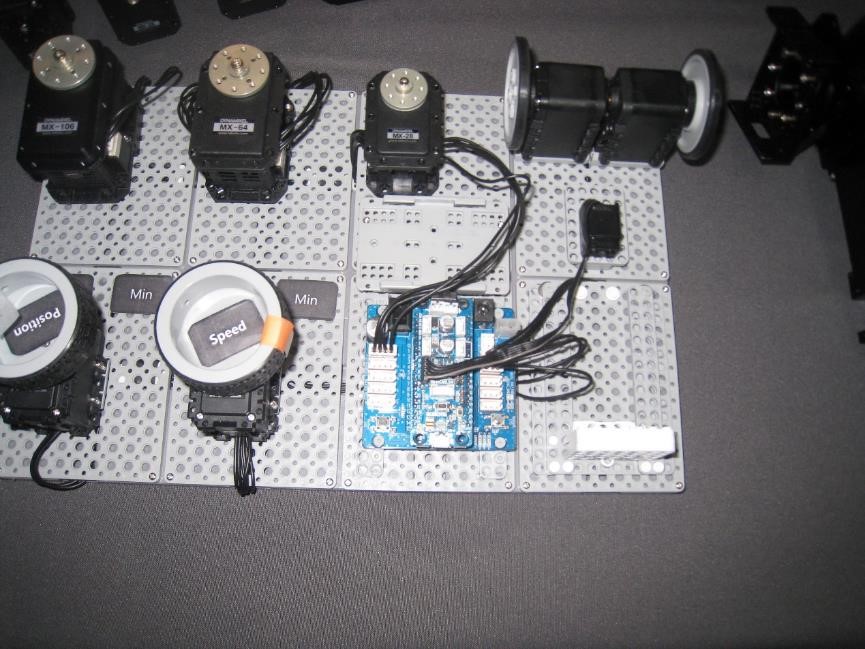
该为韩国组的机器人和一些舵机模块。通过左下方的两个伺服舵机(里面是把驱动和传感器什么的都安装好了)控制角度和速度,可以控制上方的三个舵机运动。据说,第一个机器人要12万,美元?人民币?我忘了,反正不是韩元。
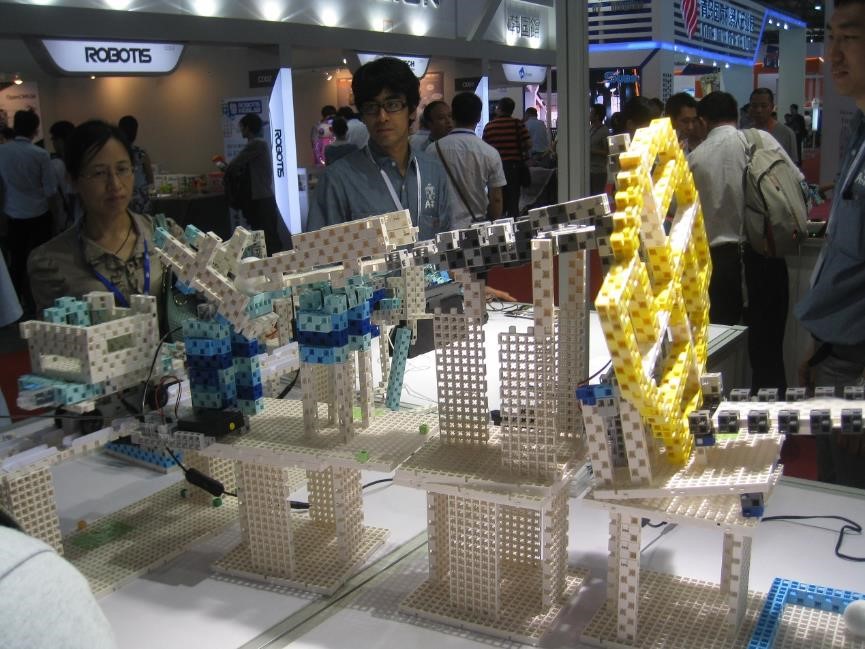
该为韩国组的类乐高积木模块所组成的一个有趣的系统。官方说法是无需编程,直接组装就可以完成功能。但看它的机构,只有几个电机盒而已

这是韩国组的类人萌妹子,真心没看懂这是在干吗?看到下面的标识了吗?不要尝试去触摸。

该为韩国组的机器人足球比赛模型。顿然我觉得被这个名字吓坏了。再仔细瞧瞧,竟然只有三个机器人,虽然我真心不看世界杯,但这个人数,也……
还有我竟然看到旁边明晃晃地放着两个东西,什么?遥控器!
谁谁曾豪言,再过多少年机器人足球运动学将打败人类足球运动学,难道就是这样的遥控方式?太扯淡了吧

该为嘉腾AGV机器人,从地上的粘贴物来看应该是磁带导航
More 更多:
1,文案提到一个新词:认知技术。嘉腾是“中国最早进行机器人认知技术探索的厂家之一”。
认知技术,指未知环境探索与地图的构建,是机器人对未知环境的一种学习。
2,提到“惯性导航技术”,“惯性导航系统与后台地图”。
通过百度百科的扫盲,发现真的有这种方法“加速度时间上的积分计算速度、位移”——惯性导航技术的原理点。当然,一定有积分产生的误差。并结合GPS进行校正,基本上可以满足相当的要求了,因为军用上也有此用法。
3,RFID传感器在AGV中的作用。
在节点和工位铺设电子标签,RFID遇到首个标签,读取其中的信息,该信息引导AGV进行相应的导向。
(图片有数量限制,见下贴:http://forum.eepw.com.cn/thread/259558/1)

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

