
在设置TIM8定时中断的时候
TIM8_CC_IRQn出错

可是在![]() 中是有定义的(更新了这个库,老师给的好像没有)
中是有定义的(更新了这个库,老师给的好像没有)
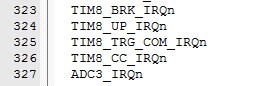
为什么会报错啊?还是不应该这样写TIM8的中断??
代码如下
#include "stm32f10x.h"
#include "misc.h"
void RCC_Configuration(void);
void NVIC_Configuration(void);
void GPIO_Configuration(void);
void TIM2_Configuration(void);
void TIM3_Configuration(void);
void TIM8_Configuration(void);
void RCC_Configuration(void)
{
SystemInit();//24兆
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//TIM3外设时钟打开,TIM3是挂在APB1上的,一
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//TIM2外设时钟打开,TIM2是挂在APB1上的,一
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE);//TIM8外设时钟打开,TIM8是挂在APB2上的,一
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);//GPIOC外设时钟打开
}
void NVIC_Configuration(void)//设置中断,二
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//响应式优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//响应式优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel =TIM8_CC_IRQn ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//响应式优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void GPIO_Configuration(void)//三,LED配置
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6;//使用到PC1.2.3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
void TIM2_Configuration(void)//四,定时器配置
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 4999;//计4999个数就产生一次更新事件,4999+1=5000,5000*0.1ms=0.5s
TIM_TimeBaseStructure.TIM_Prescaler = 2399;//预分频系数为2399,则计数器的时钟为24MHZ/2399+1=10kHZ,1/10000=0,0001.即0.1ms
//预分频数取值范围为0~65535
TIM_TimeBaseStructure.TIM_ClockDivision = 0;//
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式,从0开始向上
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);//将配置应用到TIM3中
}
void TIM3_Configuration(void)//四,定时器配置
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 9999;//计9999个数就产生一次更新事件,9999+1=10000,10000*0.1ms=1s
TIM_TimeBaseStructure.TIM_Prescaler = 2399;//预分频系数为2399,则计数器的时钟为24MHZ/2399+1=10kHZ,1/10000=0,0001.即0.1ms
TIM_TimeBaseStructure.TIM_ClockDivision = 0;//
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式,从0开始向上
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);//将配置应用到TIM3中
}
void TIM1_Configuration(void)//四,定时器配置
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 9999;//计9999个数就产生一次更新事件,9999+1=10000,10000*0.1ms=1s
TIM_TimeBaseStructure.TIM_Prescaler = 2399;//预分频系数为2399,则计数器的时钟为24MHZ/2399+1=10kHZ,1/10000=0,0001.即0.1ms
TIM_TimeBaseStructure.TIM_ClockDivision = 0;//
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式,从0开始向上
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);//将配置应用到TIM8中
}
int main(void)
{
RCC_Configuration();
NVIC_Configuration();
GPIO_Configuration();
TIM2_Configuration();
TIM3_Configuration();
TIM8_Configuration();
TIM_ClearFlag(TIM8, TIM_FLAG_Update);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ARRPreloadConfig(TIM8, DISABLE);
TIM_ARRPreloadConfig(TIM2, DISABLE);
TIM_ARRPreloadConfig(TIM3, DISABLE);
TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM1, ENABLE);//开启定时器TIM1
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);//开启定时器TIM2
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM3, ENABLE);//开启定时器TIM3
while (1) {
}
}
#include "stm32f10x_it.h"
void TIM8_IRQHandler(void)
{
if (TIM_GetITStatus(TIM8, TIM_IT_Update) != RESET) //检测是否发生溢出更新事件
{
TIM_ClearITPendingBit(TIM8, TIM_IT_Update);
GPIO_WriteBit(GPIOC, GPIO_Pin_0|GPIO_Pin_4, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_0|GPIO_Pin_4)));//取反库函数
}
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) //检测是否发生溢出更新事件
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
GPIO_WriteBit(GPIOC, GPIO_Pin_2|GPIO_Pin_6, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_2|GPIO_Pin_6)));//取反库函数
}
}
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检测是否发生溢出更新事件
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
GPIO_WriteBit(GPIOC, GPIO_Pin_1|GPIO_Pin_5, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_1|GPIO_Pin_5)));//取反库函数
}
}

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

