
开发谈不上,更多的是学习人家的。学习,进步,希望大家指出谬误。
(1)验货和装配,原理思考
(2)原理再思考
今天收到了两轮车,检查了一下,东西好少。然后发现缺了出货清单。
因此,拍照留存。

并试着自己列了一个单子:
(1)控制板;(2)连接螺钉和透明亚克力;(3)充电器;(4)充电器交流接头;(5)电池;(6)轮子和轴;(7)接线;(8)USB转TTL(PL2303芯片);(9)小小的显示屏。
这个东西不算多,争取尽快装起来!
安装完毕了!花费时间不多,其间发生了一个小问题,就是好像电池太厚,以至于主板放不下了。后来发现是两个铜柱子安装反了,注意通孔的在下面。然后发现,电源线(电池->主板)不好接,最后将电池的蓝色塑料包装剪掉一点就很好接了。
试着运行了一下,小车蓝色红色灯亮了以后,站立起来!第一步成功了。
下来学习原理吧。仔细看看资料:《平衡小车使用说明》了解不动的名词吧。
电机是重点,就从这个开始吧。
(1)电机是 ESCAP 16g 214E的, 于是搜了一下,发现淘宝上买这种电机的有一些。比如
《机器人动力电机专卖店》就卖这款电机,50元,也是二手的。其实我是想搜一下,电机的驱动和原理来着。第二个资料我看了看这个非常好:http://www.doc88.com/p-4923939400306.html
讲的是所谓直流无刷电机的原理,看来就是这款电机的原理了。大概看了一下,理解了大概。
然后看了看附带资料,具体是英文的TB6612FNG的文档,其中最关注的就是这个了:
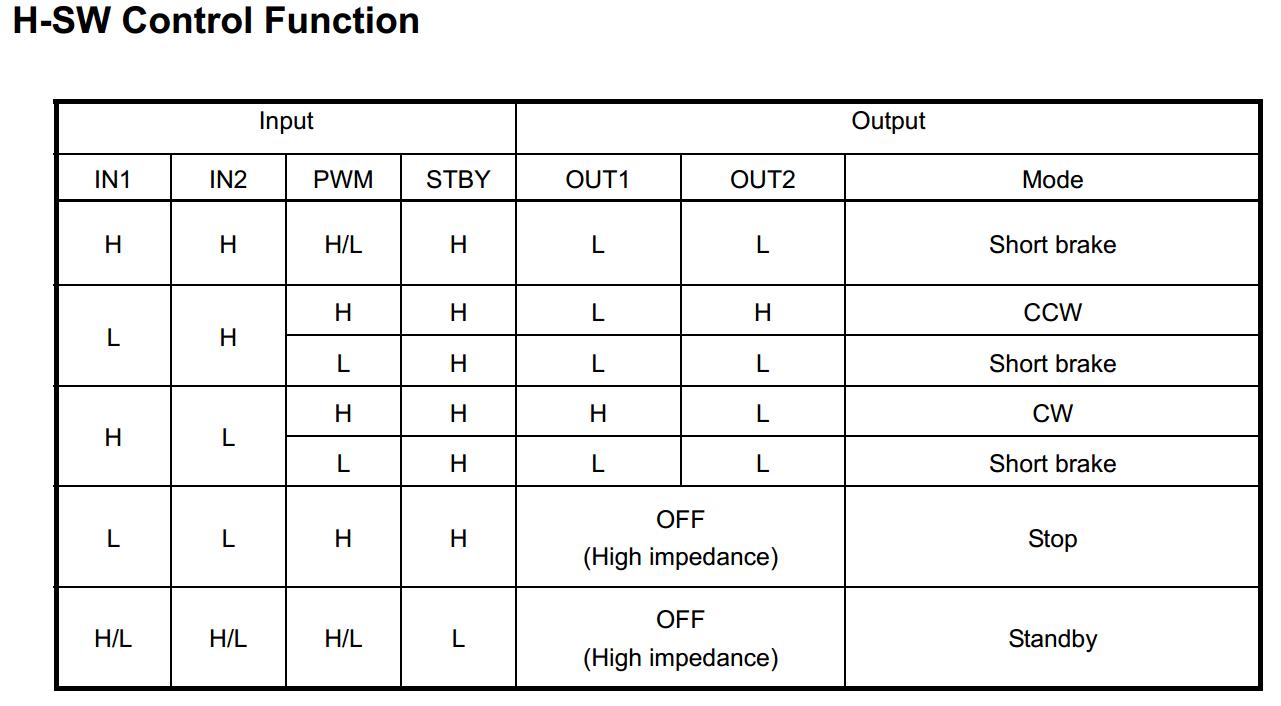
看了一下,应该是这样工作的:
IN1,in2, 如果一个高电平,一个低电平,就是高电平向着低电平旋转(CW,CCW).都为高电平为暂停,都为低电平为停止模式,STBY是个总开关!
具体的速度,则由高电平的电压决定,电压越大,则转速越快。电压输出改变,由单片机的PWM信号通过改变占空比决定。
算法:在没有开始看具体的算法资料(经典平衡小车论文)之前,看着小车的动作,我想了一下工作原理,应该是这样的:开始时,倾斜传感器检测到一个角度,然后旋转电机向这个方向旋转,产生瞬时加速度,利用惯性力将倾斜的平台抬平。车轮子则随着扭矩也动作,往前后动作。当倾角变小时,力矩变小,这样小车就实现了自动反馈平衡,当小车平衡时不停前后往复动作,大概15到20厘米吧。
惯性力和加速度方向相反,因此仔细观察小车抬头的过程和小车移动的方向,是不是呢?其实简单的说,就是小车往那边倾斜,就向那边冲(加速度),就抬头了!
原理思考:
想象一下,你站在一个平板小车上。一个恶作剧的家伙猛推了一下小车(不是你)。你会瞬间往后仰,可以理解为:惯性让你保持呆在原位置,但是你的脚随车向前冲了出去。物理上,将这种情况等效为你受到一个惯性力,F=-ma ,负号表示与加速度方向相反。
现在我们通过马达可以给小车施加惯性力了,让小车保持平衡。马达的旋转,和加速度的关系是如何的?马达的扭矩使得轮子有一个角加速度,产生一个水平的线加速度,大致可以估算出加速度。建立详细的数学模型,可能超出我的功力和努力方向了。
简单想象一下:如何竞速?两轮车在加速度过程,受到向后的惯性力,因此可以预先让小车前倾,有意让惯性力和重力的水平分量平衡,加速时保持小车不到。速度足够大时(加速度渐弱),惯性力减弱,小车跌倒趋势加剧?莫非在最后奋力一冲,将小车扶正,保持匀速运行(考虑到空气阻力,小车微微前倾)。
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

