
进程1:收到配件
收到智能车配件,先嗮一下:

主板的做工还是很精致的。
进程2:组装
先安装4枚通孔铜螺柱:
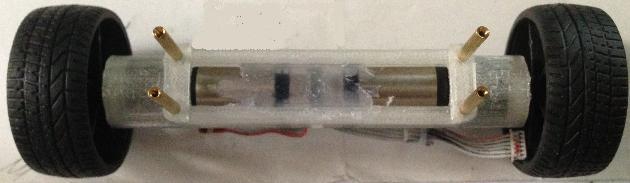
再安装电池

接着安装主板

安装OLED

安装亚历克板
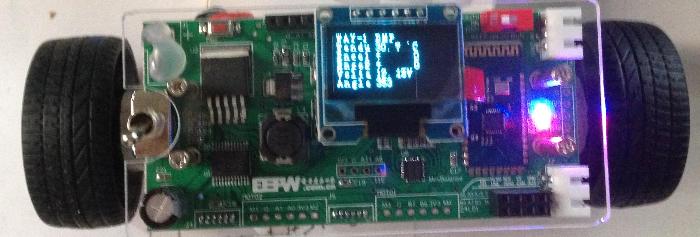
给电池充满电,插上电池插销,接通电源开关,OLED屏可以显示了。红色和蓝色LED交替闪烁进行蓝牙配对。按住板上开关,轮子可以转动了。
OK!我的平衡车基本没有问题,可供进行以后进行实验了。
总体来说,安装工作比较顺利。需要注意的是主板如果装错方向,电机的2条连接线会有1条不够长,此时需要把电池和主板一起旋转180度重新安装一次即可。
至于电机座由于3D打印而使铜螺柱安装孔对不上之说,其实是由于铜螺柱担负夹紧电池2侧的任务,在主板尚未安装上时,铜螺柱受到电池2侧挤压会向外倾斜,并非3D打印精度不够所致。
进程3:通电测试
这个平衡车刚开始要让它不倒翁还不容易,放在地板上按动启动按钮死活都不动,拿在手上按动启动按钮车轮飞速旋转,放手后就跌倒在地板上。摆弄多次才找到放手的最佳时机,视频中的小车已经可以成为不倒翁了。
进程4:建立MDK编程环境
先制作1条SWD下载线
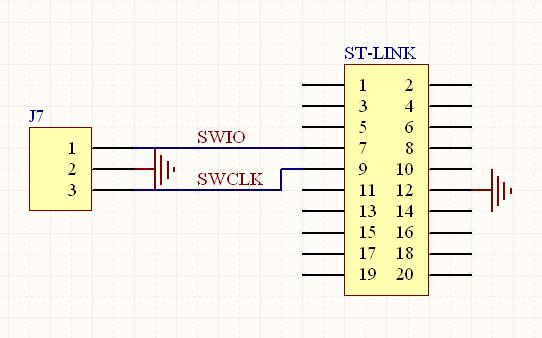
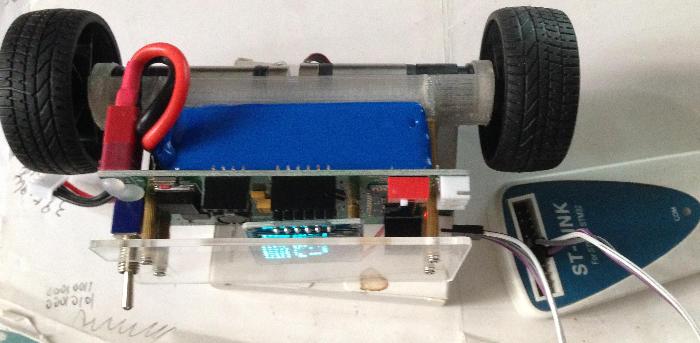
ST-LINK 通过下载线连接到小车
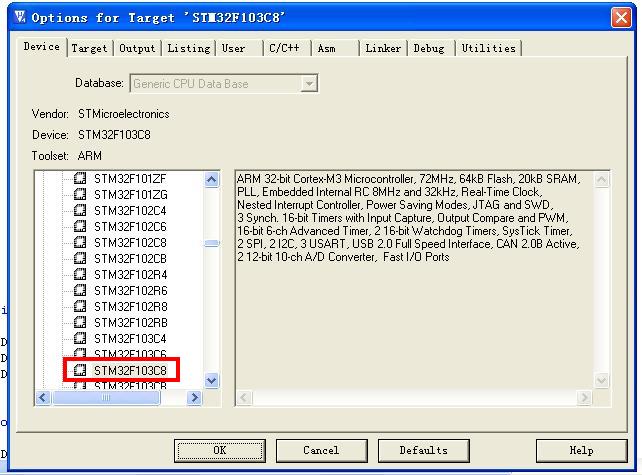
开发环境是MDK4.54,打开小车标准源码,选择芯片型号STM32F103C8
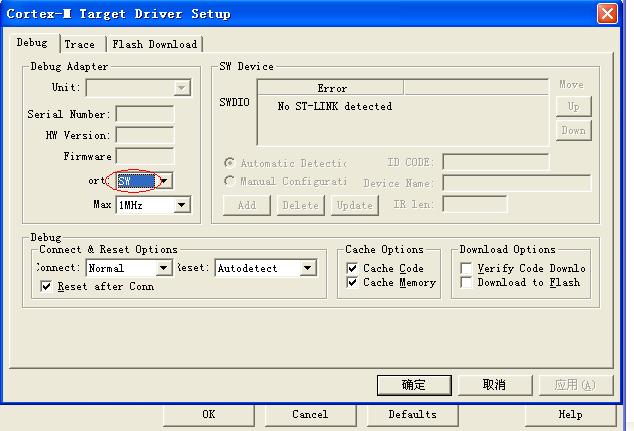
在Debug选项中选择ST-Link Debugger下载器

设置为SW下载模式
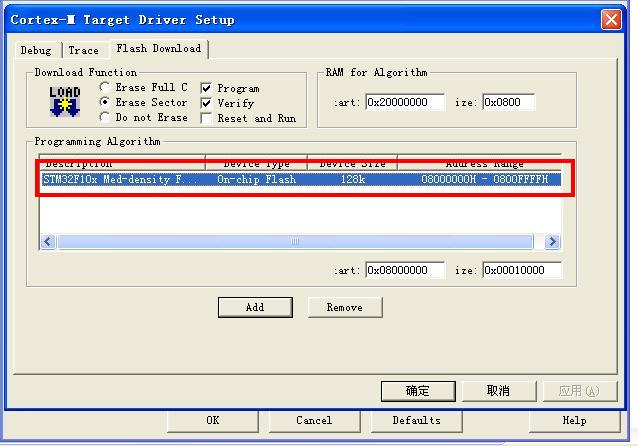
在Utilities选项中选择ST-Link Debugger

在Setting中选择芯片
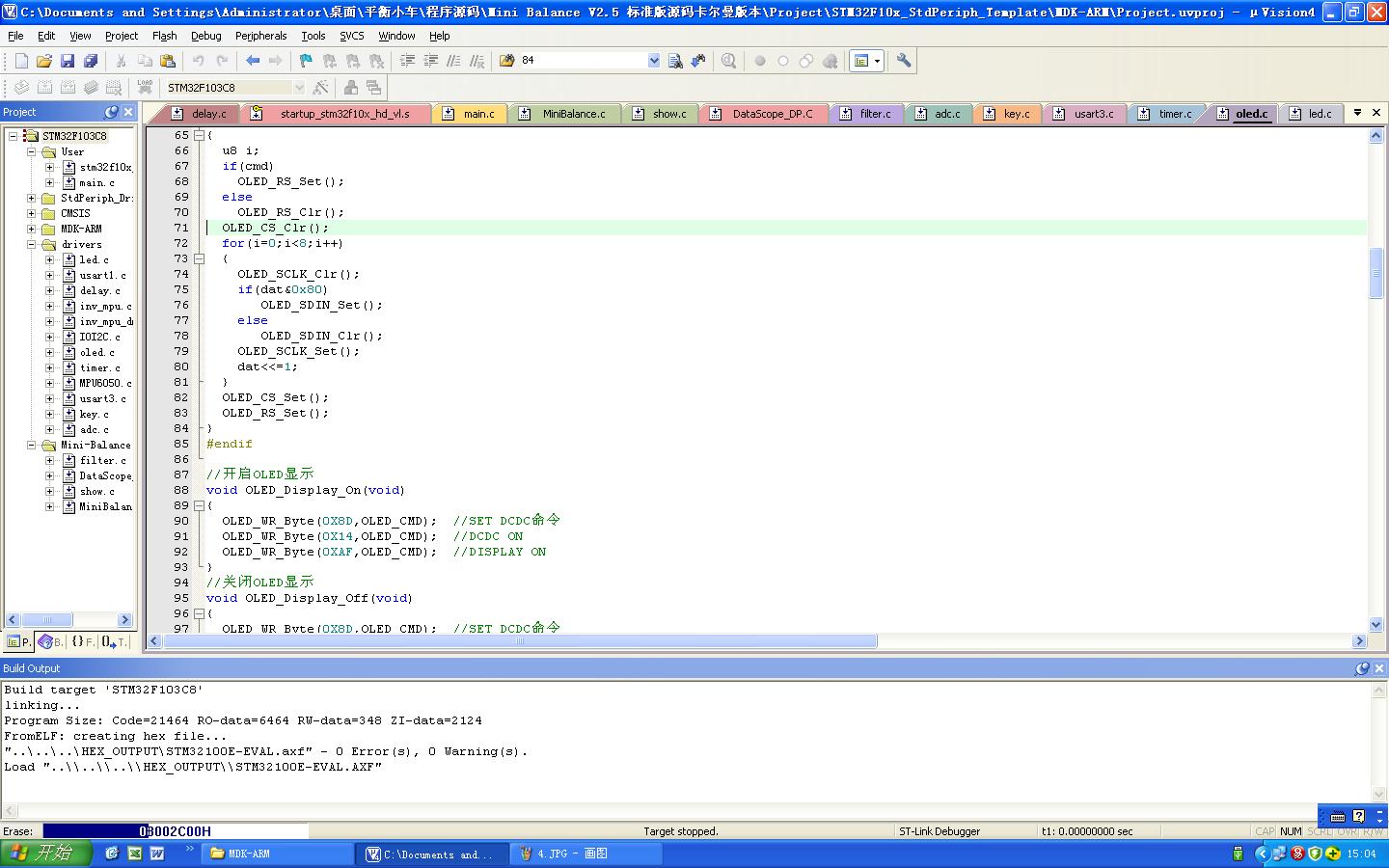
对原代码进行编译,BOOT0开关仍至于ON位置,打开小车电源,终于可以下载了。
进程5:遥控小车
由于遥控APP不支持苹果手机,决定选用无线遥控方式来控制小车的动作。
在小车预留的24L01插座上安装一片NRF24L01模块。

设计PCB板时如果能把无线模块旋转180度,模块就会安全许多

遥控部分选用STM32F103C8-PKT开发板来使用。
开发板的无线模块连接:

按键就利用原来的游戏杆

小车上的代码就直接下载《顶级版源码(标准版基础上增加摄像头底层 超声波 NRF24L01)》,其中main()函数中原来注释掉的3个函数要去掉注释:
//NRF24L01_Init();
// NRF24L01_FindMyself();
//NRF24L01();
而NRF24L01()函数中接收部分中
紧跟在RX_Mode() 函数后面的while(1)必须注释掉,否则小车一下子就摔倒了。
STM32F103C8-PKT开发板方面的代码主要部分:
int main(void)
{
SystemInit();
delay_init(72);
usart1_init();
uart3_init(72,9600);
led_init();
KEY_Init();
NRF24L01_Init();
NRF24L01_FindMyself();
while(1)
{
NRF24L01();
}
}
//-------------------------------------
//NRF24L01_Init函数修改如下:
//----------------------------------------
void NRF24L01_Init(void)
{
RCC->APB2ENR|=1<<2;
RCC->APB2ENR|=1<<3;
GPIOB->CRL&=0XFFFFFF00;
GPIOB->CRL|=0X00000033;
GPIOB->ODR |=0X0003;
GPIOA->CRL&=0XFFFF0FFF;
GPIOA->CRL|=0X00003000;
GPIOA->ODR |=0X0008;
GPIOA->CRL|=0X00080000;
SPIx_Init();
NRF24L01_CE=0;
NRF24L01_CSN=1;
}
//--------------------------------
// NRF24L01()函数修改如下
//--------------------------------
void NRF24L01(void)
{
u8 tmp_buf[33];
TX_Mode();
while(1)
{ tmp_buf[0]=0;
tmp_buf[1]=0x00;
GPIOB->ODR &=~0X8000;
NRF24L01_TxPacket(tmp_buf);
if((GPIOC->IDR & 0X8000)==0X0000)
{tmp_buf[1]=130;
GPIOB->ODR |=0X8000;
GPIOB->ODR &=~0X2000;
do{NRF24L01_TxPacket(tmp_buf);
delay_ms(10);
}while((GPIOC->IDR &0X8000)==0X0000) ;
GPIOB->ODR |=0XF000;
}
else
if((GPIOC->IDR &0X2000)==0X0000)
{
tmp_buf[1]=50;
GPIOB->ODR |=0X8000;
GPIOB->ODR &=~0X4000;
do{
NRF24L01_TxPacket(tmp_buf);
delay_ms(10);
}while((GPIOC->IDR &0X2000)==0X0000) ;
GPIOB->ODR |=0XF000;
}
delay_ms(10);
}
}
视频中小车旋转的速度如果用来走8字,小车肯定要挂了。
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
| 谨防极海G32M3101电机评估板易跌落的陷阱被打赏¥24元 | |
| 【全网首拆】M5STACK ATOM系列开发板拆解 / AtomS3R-CAM摄像头更换方法(提高10倍像素)被打赏¥26元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

