
小车上个月就回来了,期末考试忙着复习,前几天又刚刚搬完宿舍(累死),现在终于有时间玩玩小车啦,嘿嘿。故开此贴,与大家交流
目录
小车上个月就回来了,期末考试忙着复习,前几天又刚刚搬完宿舍(累死),现在终于有时间玩玩小车啦,嘿嘿。故开此贴,与大家交流
目录
第一次接触平衡小车,首先我打算学一下滤波,网上资料不少,但是都看得晕晕的,唯一一份比较好的(看过之后大概了解卡尔曼了)这里分享给大家平衡小车卡尔曼.doc。大概明白了卡尔曼滤波的5个公式是什么含义
我决定先先来看看PWM产生部分,这是我第一次接触stm32f103,所以打算把对这部分的理解写出来,望大家指出错误。
也就是 void MiniBalance_PWM_Init(u16 arr,u16 psc) 这个函数
首先是对TIM3以及IO口的时钟使能,stm32单片机每次对IO口以及外设操作时都要先使能相应的时钟!
例程使用了TIM3的PWM2模式,stm32的每个通用定时器都可以使出4路PWM。即有4个独立的通道,这里使用了通道3和通道4
查阅手册,有俩个 捕获/比较模式寄存器(TIMx_CCMR1和TIMx_CCMR2),其中TIMx_CCMR1控制通道1和通道2;TIMx_CCMR2控制通道3和通道4 。
关于PWM的俩个输出模式 :110:PWM模式1- 在向上计数时,一旦TIMx_CNTTIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。 111:PWM模式2- 在向上计数时,一旦TIMx_CNTTIMx_CCR1时通道1为有效电平,否则为无效电平。
关于有效电平和无效电平,具体配置在 捕获/比较使能寄存器(TIMx_CCER) 中的 CCxP 位中设置 x 为通道号,CCx通道配置为输出: 0:OCx高电平有效 1:OCx低电平有效 例程中将低电平设为有效,还有貌似例程中应该是PWM模式1才对..
函数入口参数有俩的个,arr自动重装值 psc始时钟分频系数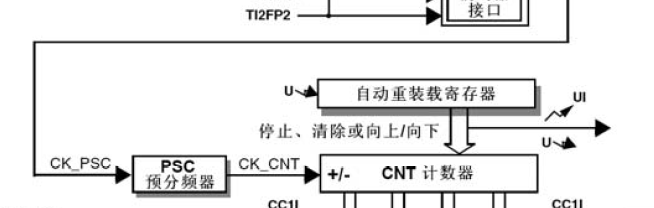 大家可以看这张图来理解,分频器将时钟信号分频,供给计数器使用。
大家可以看这张图来理解,分频器将时钟信号分频,供给计数器使用。
总结一下就是 定时器向上计数值小于 arr ,输出为高电平,计数值大于arr 输出低电平,然后自动重装,输出PWM。
如有错误望大家指出
接下来进行了平衡小车的前进后退实验
我将MiniBalence中第18行代码改为如下:
int Balance_Pwm,Velocity_Pwm,Turn_Pwm; extern int tt; void TIM1_UP_TIM16_IRQHandler(void) { if(TIM1->SR&0X0001)//5ms¶¨Ê±ÖÐ¶Ï { TIM1->SR&=~(1<<0); //===Çå³ý¶¨Ê±Æ÷1Öжϱê־λ tt++; if(tt<500) Flag_Qian=1,Flag_Hou=0,Flag_Left=0,Flag_Right=0; if(tt>=500 && tt<1500) Flag_Qian=0,Flag_Hou=0,Flag_Left=0,Flag_Right=0; if(tt>=1500 && tt<2000) Flag_Qian=0,Flag_Hou=1,Flag_Left=0,Flag_Right=0; if(tt>2000) tt=0; readEncoder(); //===¶ÁÈ¡±àÂëÆ÷µÄÖµ Led_Flash(400); //===LEDÉÁ˸ Get_battery_volt(); //===»ñÈ¡µç³Øµçѹ key(100); //===ɨÃè°´¼ü״̬ Get_Angle(Way_Angle); //===¸üÐÂ×Ë̬ Balance_Pwm =balance(Angle_Balance,Gyro_Balance); //===ƽºâPID¿ØÖÆ Velocity_Pwm=velocity(Encoder_Left,Encoder_Right); //===ËٶȻ·PID¿ØÖÆ Turn_Pwm =turn(Encoder_Left,Encoder_Right,Gyro_Turn); //===תÏò»·PID¿ØÖÆ Moto1=Balance_Pwm+Velocity_Pwm-Turn_Pwm; //===¼ÆËã×óÂÖµç»ú×îÖÕPWM Moto2=Balance_Pwm+Velocity_Pwm+Turn_Pwm; //===¼ÆËãÓÒÂÖµç»ú×îÖÕPWM Xianfu_Pwm(); //===PWMÏÞ·ù if(Turn_Off(Angle_Balance,Voltage)==0) //===Èç¹û²»´æÔÚÒì³£ Set_Pwm(Moto1,Moto2); //===¸³Öµ¸øPWM¼Ä´æÆ÷ } }
视频中我观察到小车由于惯性原因停留过程不是很理想,在后续的学习中,加入编码器的相关参数应该会更好些。
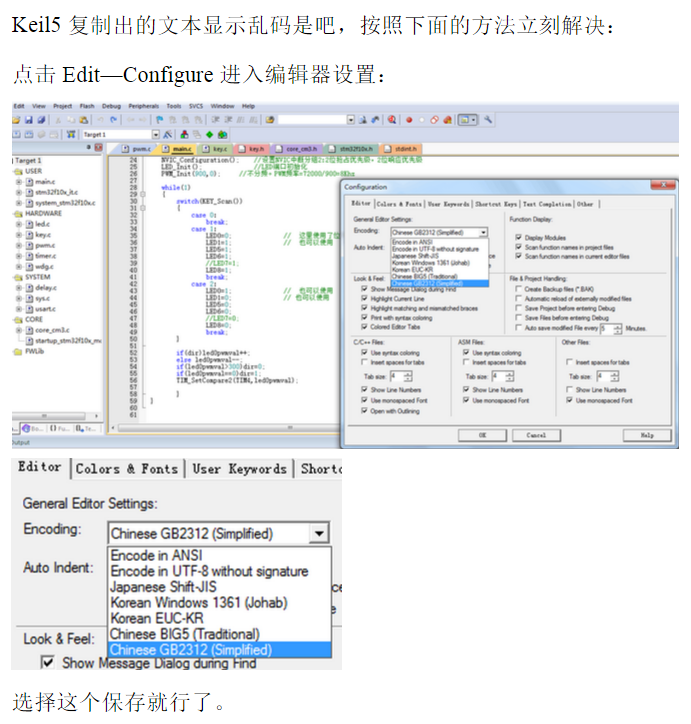
这里有点小问题,我复制的代码注释全部是乱码,不知道怎么解决..
这几天学习了一下mpu6050,有一些心得,在这里写出来
我们使用6050的方法其实就是用IIC先向6050寄存器内部写入特定值来初始化他,然后读取6050寄存器的值就得到数据,所以先介绍一下6050的寄存器:
电源管理寄存器1(0X6B)

EVICE_RESE=1,复位MPU6050,复位完成后,自动清零。
SLEEP=1,进入睡眠模式;SLEEP=0,正常工作模式。
TEMP_DIS,用于设置是否使能温度传感器,设置为0,则使能
CLKSEL[2:0],用于选择系统时钟源
000 内部8M RC晶振
001 PLL,使用X轴陀螺作为参考
010 PLL,使用Y轴陀螺作为参考
011 PLL,使用Z轴陀螺作为参考
100 PLL,使用外部32.768Khz作为参考
101 PLL,使用外部19.2Mhz作为参考
110 保留
111 关闭时钟,保持时序产生电路复位状态
陀螺仪配置寄存器(0X1B)

FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围:0,±250°/S;1,±500°/S;2,±1000°/S;3,±2000°/S;
加速度传感器配置寄存器(0X1C)

AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围:0,±2g;1,±4g;2,±8g;3,±16g;
FIFO使能寄存器(0X23)

该寄存器用于控制FIFO使能,在简单读取传感器数据的时候,可以不用FIFO,设置对应位为:0,即可禁止FIFO,设置为1,则使能FIFO。
TEMP_FIFO_EN为内部温度传感器的FIFO使能,其他位都如此
陀螺仪采样率分频寄存器(0X19)

该寄存器用于设置MPU6050的陀螺仪采样频率,计算公式为:
采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)
温度传感器数据输出寄存器(0X41~0X42)

通过读取0X41(高8位)和0X42(低8位)寄存器得到,温度换算公式为:
Temperature = 36.53 + regval/340
其中,Temperature为计算得到的温度值,单位为℃,regval为从0X41和0X42读到的温度传感器值。
配置寄存器(0X1A)

字低通滤波器(DLPF)的设置位,即:DLPF_CFG[2:0],加速度计和陀螺仪,都是根据这三个位的配置进行过滤的

加速度传感器数据输出寄存器(0X3B~0X40)

加速度传感器数据输出寄存器总共由6个寄存器组成,输出X/Y/Z三个轴的加速度传感器值,高字节在前,低字节在后。
陀螺仪数据输出寄存器(0X43~0X48)

以上就是一些比较重要的寄存器,我们使用6050是,大多是移植来的,论坛里有版主发的移植教程,简单易懂,我把MPU6050.c里的一些函数拿出来分析一下:
首先我们打开头文件,看到的是大块儿的宏定义,这些就是6050寄存器的地址以及相关操作需要写入的值。
配置过程,例如:
在void MPU6050_setClockSource(uint8_t source){ IICwriteBits(devAddr, MPU6050_RA_PWR_MGMT_1, MPU6050_PWR1_CLKSEL_BIT, MPU6050_PWR1_CLKSEL_LENGTH, source); }就是在向 电源管理寄存器1(0X6B) 写入值,配置6050,接下来的其他配置函数都是如此
/**************************************************************************
函数功能:读取MPU6050内置DMP的姿态信息
入口参数:无
返回 值:无
作 者:平衡小车之家
**************************************************************************/
void Read_DMP(void)
{
unsigned long sensor_timestamp;
unsigned char more;
long quat[4];
dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more);
if (sensors & INV_WXYZ_QUAT )
{
q0=quat[0] / q30;
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
Pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3;
printf("%f\r\n",Pitch);
}
}
中,就是从6050相关寄存器读出值,这里要说一下:MPU6050 DMP输出的是姿态解算后的四元数,采用q30格式,也就是放大了2的30次方,我们要得到欧拉角,就得做一个转换,代码如下:
q0=quat[0] / q30; //q30格式转换为浮点数 q1=quat[1] / q30; q2=quat[2] / q30; q3=quat[3] / q30; //计算得到俯仰角/横滚角/航向角 pitch=asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; //俯仰角 roll=atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3;//横滚角 yaw=atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //航向角
由于平衡小车只用到了俯仰角,所以另外两个省略了。 uat[0]~quat[3]:是MPU6050的DMP解算后的四元数,q30格式。 q30:是一个常量:1073741824,即2的30次方。 57.3:是弧度转换为角度,即180/π,这样结果就是以度(°)为单位的。
这是我的一些心得,也只是一些皮毛
关于6050的FIFO还不是很理解,有待继续学习
这里有一份MPU6050的源码及其说明,大家可以拿去研究
卡尔曼 互补滤波移植实验
楼主手里有一块stm32f407开发板,板上板载了mpu6050,不得不说6050的DMP很方便,但是我觉得滤波算法也是比较重要的,所以试着将平衡车例程中的滤波算法移植到了开发板上,过程如下:
将例程中的filter文件夹复制到工程目录的HANDWARE下,然后添加到keil中,别忘了头文件路径,我注意到例程中没5ms通过中断进行滤波,这应该就对应着滤波算法中的 fioat dt=0.005;(积分时间)所以移植时我们也要注意这一点,每5ms进行一次滤波
下面是timer.c文件中的定时器初始化函数:
void TIM3_Int_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<1; //TIM3时钟使能 TIM3->ARR=arr; //设定计数器自动重装值
TIM3->PSC=psc; //预分频器
TIM3->DIER|=1<<0; //允许更新中断 TIM3->CR1|=0x01; //使能定时器3
MY_NVIC_Init(1,3,TIM3_IRQn,2); //抢占1,子优先级3,组2
}
(开发板是stm32f407)
然后是倾角读取函数:
void Get_Angle(void)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
if(gyroy>32768) gyroy-=65536; //数据类型转换 也可通过short强制类型转换
if(gyroz>32768) gyroz-=65536; //数据类型转换
if(aacx>32768) aacx-=65536; //数据类型转换
if(aacz>32768) aacz-=65536; //数据类型转换
aacy=atan2(aacx,aacz)*180/PI; //计算与地面的夹角
gyroy=gyroy/16.4; //陀螺仪量程转换
if(flag==1)
Kalman_Filter(aacy,-gyroy); //卡尔曼滤波
else if(flag==2)
Yijielvbo(aacy,-gyroy); //一阶互补滤波
}
}
定时中断部分:
void TIM3_IRQHandler(void)
{
if(TIM3->SR &0x0001)
{
TIM3->SR &=~(1<<0); Get_Angle(); } }
主函数:
u8 flag=1; //1:卡尔曼滤波 2:互补滤波
int main(void)
{
Stm32_Clock_Init(336,8,2,7);
delay_init(168); //延时初始化
uart_init(84,115200); //初始化串口波特率为500000
MPU_Init(); //初始化MPU6050
while(mpu_dmp_init())
{
delay_ms(200);
delay_ms(200);
}
TIM3_Int_Init(50-1,8400-1);
while(1)
{
printf("%5f,%5f\r\n",pitch,angle);
}
}
今天调试是由于还不太了解示波上位机的协议,所以用了串口打印的方法调试,pitch为DMP读出数据,作为参考,angle为滤波结果,波形上位机以后再补图。
移植完成后滤波效果还不错,就是收敛有些慢,参数有待调整。
今天对上次滤波的参数做了调整,主要是调整了积分时间,得到了滤波效果不错的波形,本次试验使用了匿名四轴的上位机,下面会附上
这是得到的波形(蓝色为6050DMP所得,作为参考)
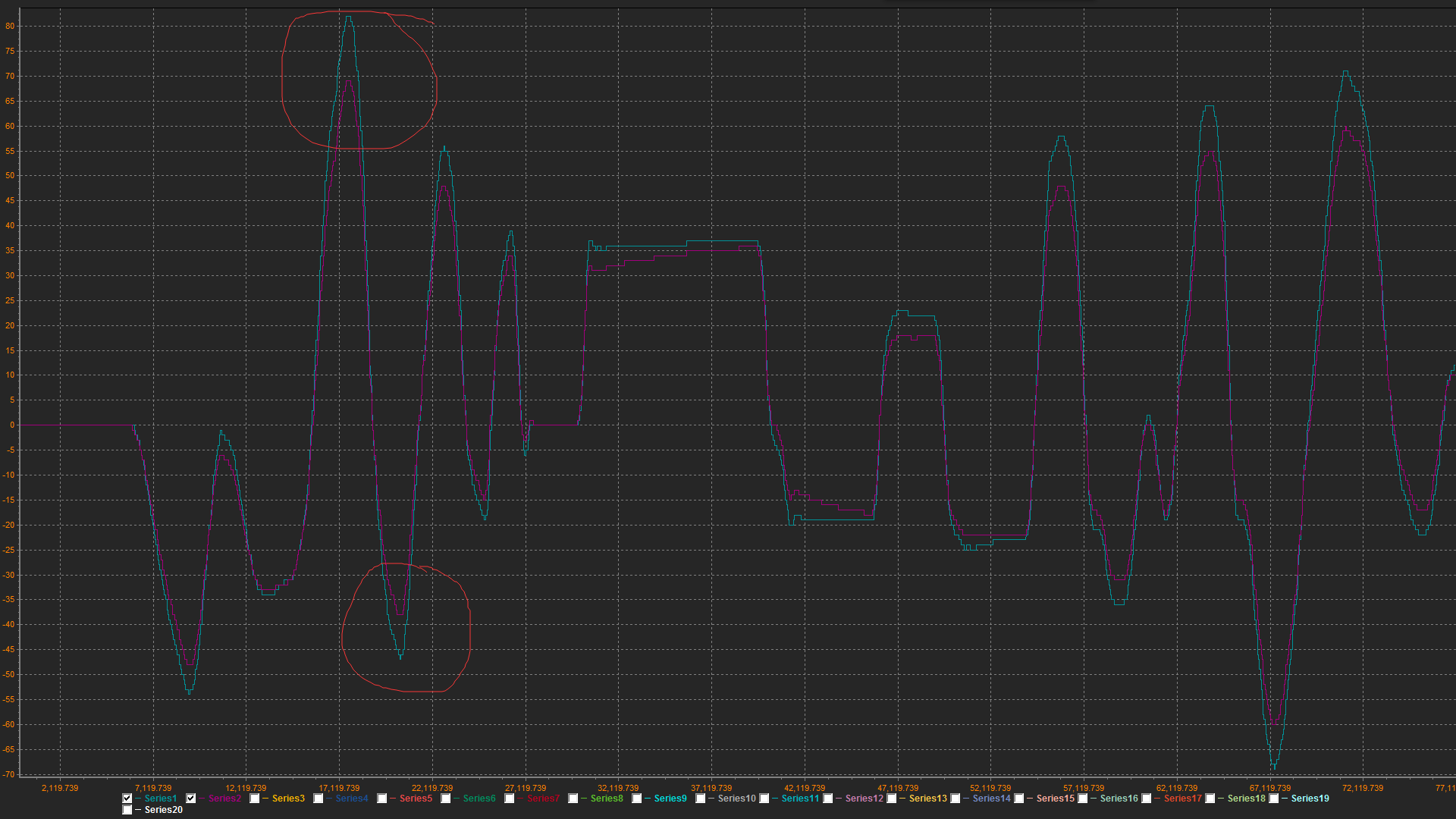
可以看出卡尔曼滤波得到的结果还是有些延迟,在峰值处比较明显
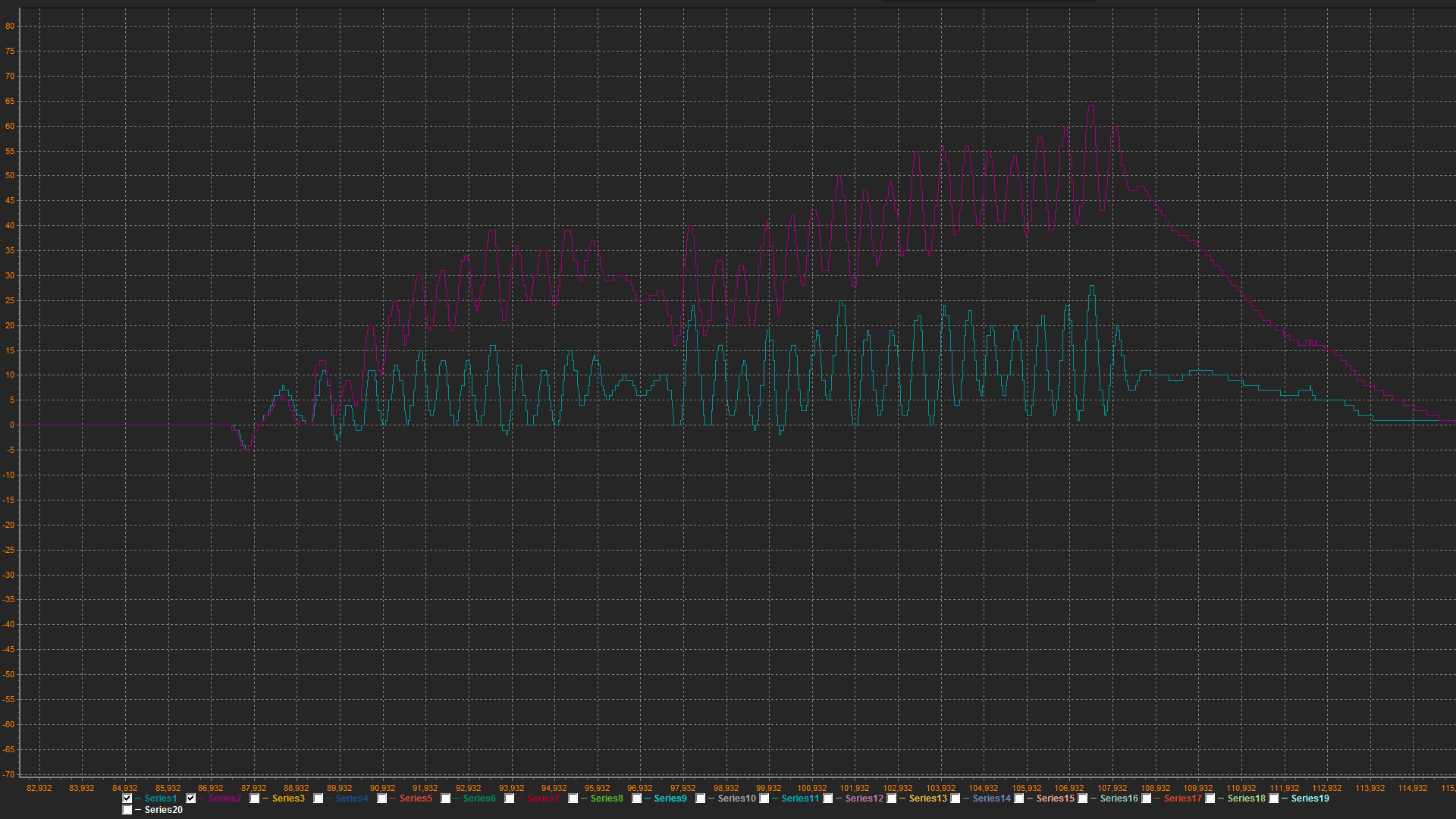
下面这张图是剧烈摇晃开发板是得到的波形,卡尔曼与DMP出现了明显的偏差:
下面附上程序(stm32f407)
void usart1_send_char(u8 c)
{
while((USART1->SR&0X40)==0);//等待上一次发送完毕
USART1->DR=c;
}
//传送数据给匿名四轴上位机软件(V2.6版本)
//fun:功能字. 0XA0~0XAF
//data:数据缓存区,最多28字节!!
//len:data区有效数据个数
void usart1_niming_report(u8 fun,u8*data,u8 len)
{
u8 send_buf[32];
u8 i;
if(len>28)return; //最多28字节数据
send_buf[len+3]=0; //校验数置零
send_buf[0]=0X88; //帧头
send_buf[1]=fun; //功能字
send_buf[2]=len; //数据长度
for(i=0;i<len;i++)send_buf[3+i]=data[i]; //复制数据
for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //计算校验和
for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //发送数据到串口1
}
//发送加速度传感器数据和陀螺仪数据
//aacx,aacy,aacz:x,y,z三个方向上面的加速度值
//gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值
void mpu6050_send_data(short aacx,short aacy)
{
u8 tbuf[4];
tbuf[0]=(aacx>>8)&0XFF;
tbuf[1]=aacx&0XFF;
tbuf[2]=(aacy>>8)&0XFF;
tbuf[3]=aacy&0XFF;
usart1_niming_report(0XA1,tbuf,4);//自定义帧,0XA1
}
int main(void)
{
Stm32_Clock_Init(336,8,2,7);
delay_init(168); //延时初始化
uart_init(84,500000); //初始化串口波特率为500000
MPU_Init(); //初始化MPU6050
while(mpu_dmp_init())
{
delay_ms(200);
delay_ms(200);
}
TIM3_Int_Init(85-1,8400-1);
while(1)
{
mpu6050_send_data(pitch,-angle);//用自定义帧发送加速度和陀螺仪原始数据
}
}
程序中可以看出积分时间为8.5ms
大家帮忙看看,不知道这样的滤波效果能不能用来做平衡车
ANO_Tech匿名四轴上位机_V2.6 (1).zip 弹出的小篮框直接无视Alt+F4,之后可能会提示下载出错,无视,按F12弹出使用帮助
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
| 谨防极海G32M3101电机评估板易跌落的陷阱被打赏¥24元 | |
| 【全网首拆】M5STACK ATOM系列开发板拆解 / AtomS3R-CAM摄像头更换方法(提高10倍像素)被打赏¥26元 | |

 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

