
第一次在论坛中发学习进程帖,若有不足,请大家提出来,谢谢!
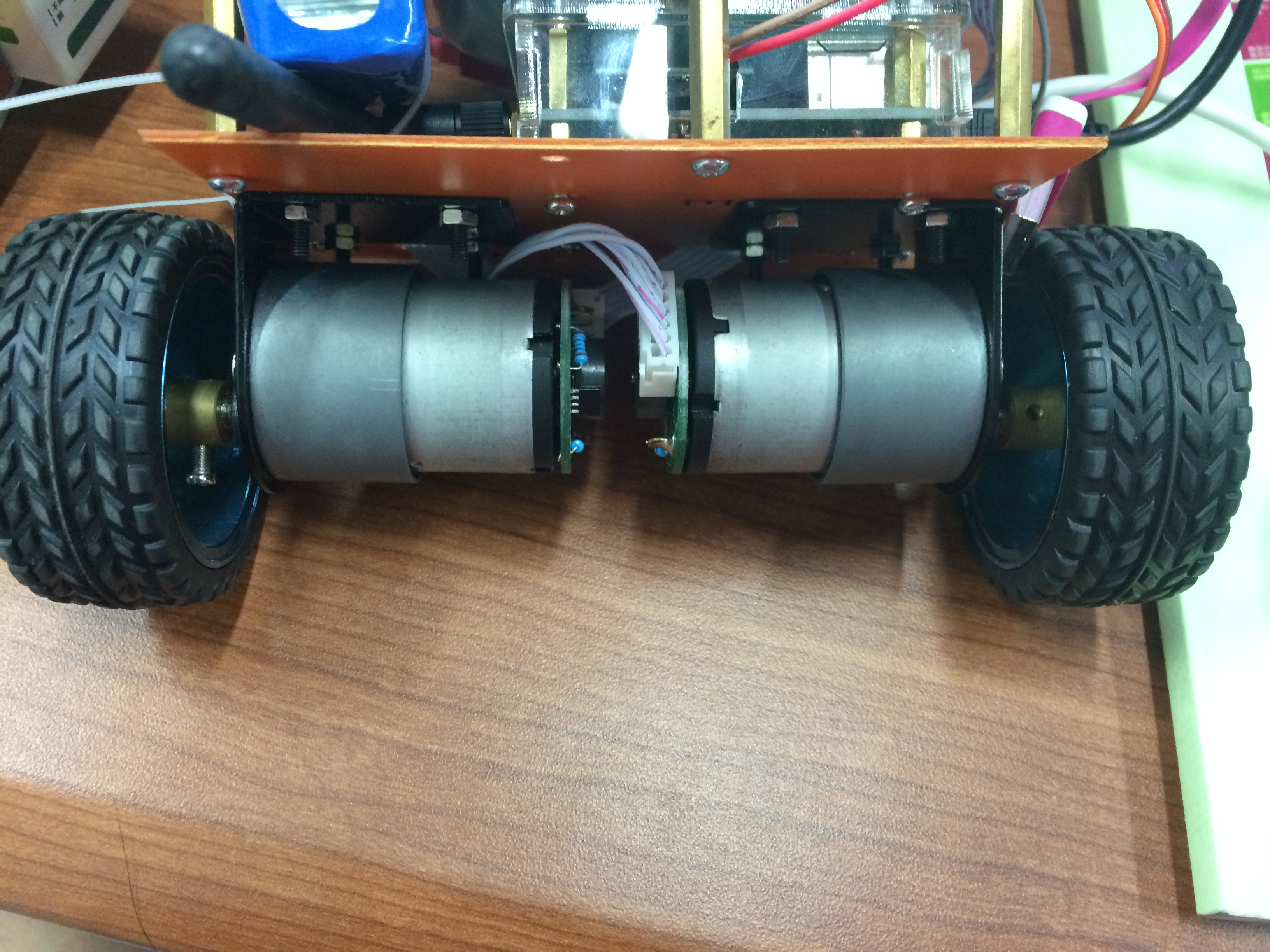
本次的平衡小车从功能选择,硬件电路设计,焊接,到软件部分学习与调试基本都是自主DIY的,将从以下几个方面讲述我的学习进程吧。
1.拟定实现的功能:
(1)自平衡;
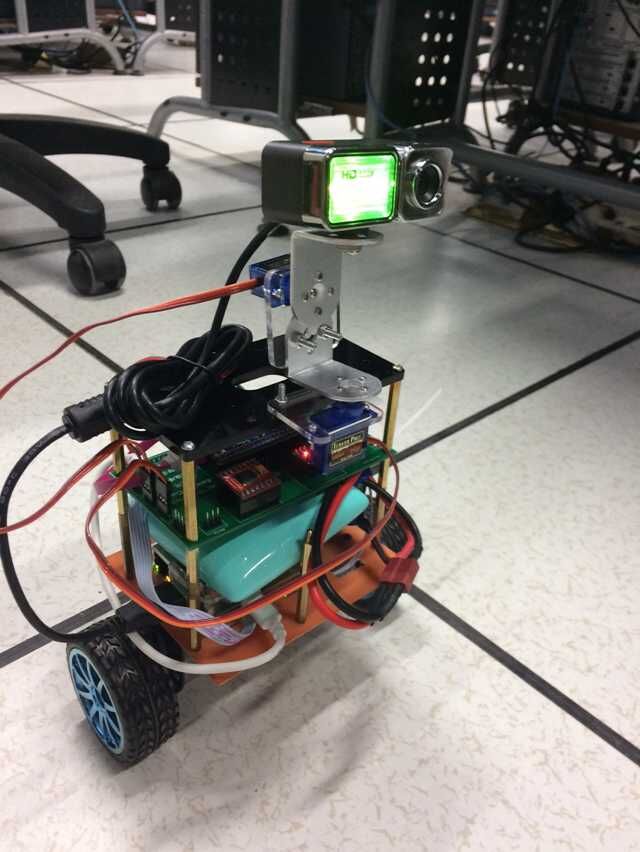
(2)oled屏上显示小车简单信息;
(3)手机通过连接wife控制小车前进左右;
(4)小车上安装摄像头,拍摄视频可以通过wife直接传输到手机上;
(5)可以通过手机控制实现摄像头上下左右摇摆;
(6)安装超声波模块,遇到障碍左右旋转判断左右方向上障碍距离,自主选择最优路线,实现智能避障。








 ,如果能详细一点就更好了!
,如果能详细一点就更好了! 

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

