
AUTOSAR平台是目前应用范围最广的车载电子系统标准规范,规定了车载操作系统标准与API接口。目前AUTOSAR分为两个平台,即Classic平台和Adaptive平台,分别对应传统控制类车辆电子系统与对应自动驾驶的高性能类车载电子系统。

1、Classic平台
Classic平台是AUTOSAR针对传统车辆控制嵌入式系统的解决方案,具有严格的实时性和安全性限制。
主要包含微控制器层(Microcontroller)、基础软件层(Basic Software)、中间件层(Runtime Environment,RTE)以及应用层(Application)。在上述分层中,最重要的是基础软件层,其可再分为服务层(Services Layer),ECU抽象层(ECU Abstraction Layer),微控制器抽象层(Microcontroller Abstraction Layer),复杂驱动(Complex Device Drivers)。
服务层主要提供各类维持系统运行的基础服务,如监控,诊断,通信,以及实时操作系统等;ECU抽象层主要功能是封装微处理器及其外围设备, 使得异构ECU对上层始终表现出统一的功能特性,从而达到软件应用层与硬件系统相分离的目的;微处理器抽象层是基础软件的最底层,其主要功能是对微控制器进行分装,例如I/O、ADC、SPI等;复杂驱动用于那些不能进行统一封装的复杂硬件,为上层RTE访问硬件提供支持。
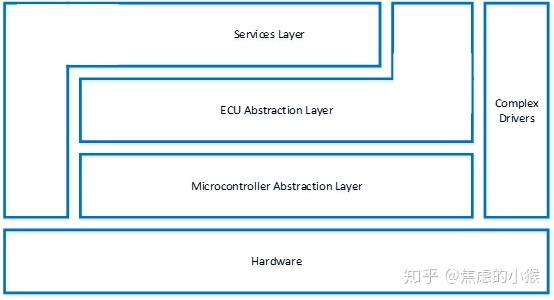
AUTOSAR Classic平台架构
该平台实现了汽车软件的层次化与模块化,将硬件依赖和非硬件依赖的软件进行了封装,同时如果使用工具链进行开发,基础软件可以通过配置参数实现功能剪裁,算法逻辑,便于基础软件的开发。
除此之外,接口的标准化可以便于基础软件与硬件抽象层软件对接,缩短开发周期的同时也为OEM提供了更多的选择空间。目前发展已经很成熟,开发人员可以完全忽略硬件平台不同所带来的差异。
2、Adaptive平台介绍
Adaptive平台是AUTOSAR联盟针对未来自动驾驶提出的一种新型汽车电子系统软件架构标准。其修改了大量原有标准的内容,采用了基于POSIX标准的操作系统,以面向对象的思想进行开发,并且可使用所有标准的POSIX API,主要目的是为满足未来的高级自动驾驶需求。Adaptive平台主要提供高性能计算与通讯机制,并且提供灵活的软件配置,例如软件远程更新(OTA)等。
除此以外,自动驾驶的发展对于处理器计算能力有了更高的需求,以及多核处理器、GPU、FPGA以及专用加速器的需求,都超出了Classic平台的支持范围。处理能力暴增的需求以及内部通信速度加快的需求都助推了Adaptive平台的发展。
AUTOSAR Adaptive采用了以往未被ECU充分利用的各种成熟技术,同时允许在Adaptive实现中最大限度的自由来利用创新技术。Adaptive平台很可能最先应用于高级驾驶辅助系统(ADAS),还能为标准操作系统无缝整合更多的互联功能和图像处理能力,从而协助智能座舱、自动驾驶系统的开发。
AUTOSAR Adaptive平台主要包括如下部分:
(1)用户应用
用户应用是指运行在Adaptive平台上的一系列自适应应用,一个应用可以为其他应用提供服务,这样的服务称为非平台服务。
(2)支持用户应用的AUTOSAR Runtime
支持自适应应用的Autosar Runtime(ARA,Autosar Runtime for Adaptive Application)由功能集群提供的一系列应用接口组成。ARA中有两种类型的功能集群,分别是自适应平台基础功能和自适应平台服务。
(3)机器/硬件
Adaptive平台将运行的硬件视作机器(Machine),其隐含意义是硬件可以通过各种管理程序相关技术进行虚拟化,并且可以实现一致的平台视图。
AUTOSAR Adaptive的架构逻辑视图如下图所示。
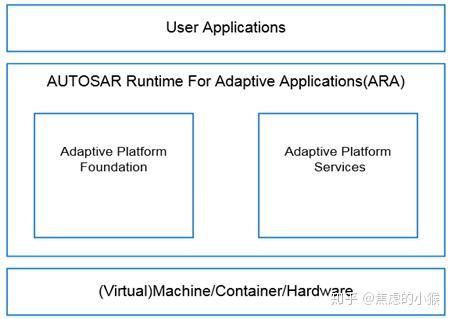
AUTOSAR Adaptive的架构逻辑视图
未来智能网联汽车操作系统应当具备高安全性、高实时性并支持高性能计算的特点,以满足底盘控制、动力系统、自动驾驶的需求。智能网联汽车相比于传统汽车对计算能力提出了很高的要求,传统分布式的嵌入式系统已经无法满足智能网联汽车的功能需求。
因此,未来需要定义一个新的通用计算平台,用高性能的中央计算平台取代现在常用的分布式计算架构,让控制系统信息架构逐渐软硬件分离、并形成标准化的软硬件系统。通用计算平台的软件架构的示意图如下所示。
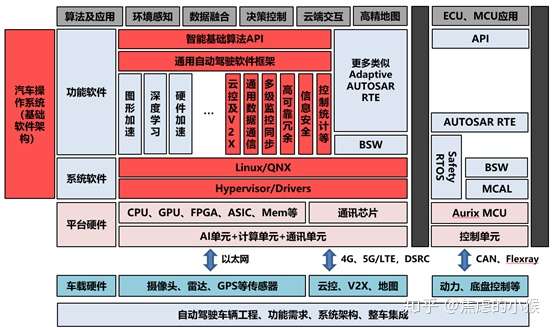
通用计算平台的软件架构图
具体而言,未来智能网联汽车操作系统将应用以下技术,以实现满足通用计算平台高计算能力的需求:
首先,未来智能网联汽车操作系统应当适配多核处理器架构,并支持多任务处理。通用计算平台在硬件上采用异构复杂嵌入式系统,GPU、FPGA和专用加速器已经在智能网联汽车上得到大量的应用,相比于传统嵌入式芯片,他们提供了更加优秀的性能表现与能耗控制。智能网联汽车操作系统向下应当能够适配各类硬件设备,向上则需要支持环境感知、数据融合、高精度地图、V2X等多种功能软件的任务处理。
其次,为充分利用硬件资源,采用虚拟化技术充分发挥异构复杂嵌入式系统的计算能力。Hypervisor是一种运行在硬件层和操作系统之间的中间软件层,可允许多个操作系统和应用共享一套基础物理硬件,通过虚拟化的技术将底盘控制系统、车身动力系统、自动驾驶系统、智能座舱系统隔离,并运行在用户空间。虚拟化层能够将硬件底层隐藏,使不同操作系统保持独立,保证各个系统的安全,同时通过采用安全通信机制将它们融合。在这种架构下,各个系统就能够独立运行,这将很好地解决智能车载系统的安全性、可靠性和高性能计算之间的矛盾。
第三,分模块采用不同底层操作系统满足车辆高实时性与高性能计算的需求。在传统底盘控制层面,采用基于AUTOSAR Classic平台OSEK/VDX标准的实施嵌入式操作系统,保障车辆控制的实时性与功能安全;在智能决策和感知系统方面,采用基于AUTOSAR Adaptive平台POSIX标准的非实时操作系统软件,以满足自动驾驶的高性能计算需求。
第四,在车内通讯方面,采用CAN、Flexray、以太网多类型相结合的车内通讯网关。传统的CAN总线常用传输速率500kbps,最大传输速率1Mbps;新型CANFD总线最大传输速率5Mbps;车载以太网传输速率可达1Gbps,同时具有开放性和互联扩展的优势。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

