
距离测量和目标检测在许多领域发挥着重要作用,包括工厂自动化、机器人应用和物流。特别是在安全应用领域,需要对特定距离的物体或人员进行检测和响应。例如,一旦工人进入危险区域,机械臂就可能需要立即停止操作。
因此,飞行时间(ToF)变得越来越重要。使用ToF技术,光从调制光源(如激光)****,光束经过一个或多个物体反射后由传感器或摄像机捕获。因此,可以通过****光与接收****光之间的时间延迟?6?2T来确定距离。时间延迟与摄像机和物体之间的两倍距离(往返)成正比。所以,距离可估算为深度d = (c × Δt)/2,其中c表示光速。ToF摄像机输出2D数据以及所需的深度信息。
ToF允许一次记录整个图像。不需要逐行扫描,也不需要传感器和被观察物体之间的相对运动。ToF通常划归为LIDAR(光探测和测距),但它实际上是基于flash LIDAR的方法,而不是扫描LIDAR。
利用ToF测量光脉冲的飞行时间基本上有两种不同的方法:基于电荷耦合器件(CCD)技术的脉冲操作模式和连续波(CW)操作模式。
在脉冲模式下测量光脉冲****和接收之间经过的时间,在CW模式下测定****和接收调制光脉冲之间的相移。这两种操作模式都各有优缺点。脉冲模式更耐环境光,因此更有利于户外应用,因为该技术通常依赖短集成窗口在很短的时间内发出的高能光脉冲。而CW模式可能更容易实现,因为光源不必很短,且具有上升/下降沿。但是,如果精度要求变得更严格,那么将需要更高频率的调制信号,这可能很难实现。
现有的像素大小使得芯片分辨率很高,不仅支持距离测量,也支持物体和手势识别。测量距离从几厘米(《10厘米)到几米(《15米)不等。
遗憾的是,并非所有物体都能同样探测到。物体的状况、反射率和速度都会影响测量结果。
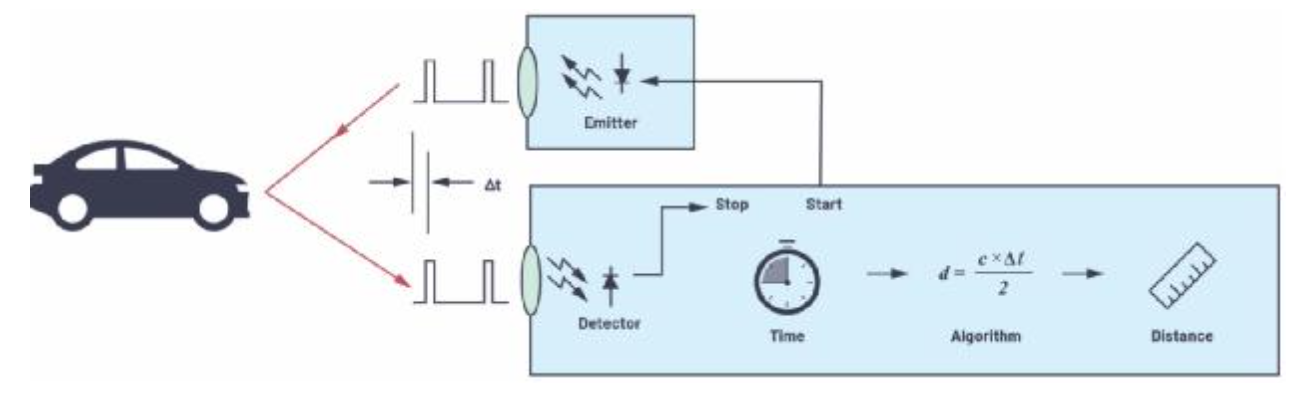
图1.飞行时间测量原理
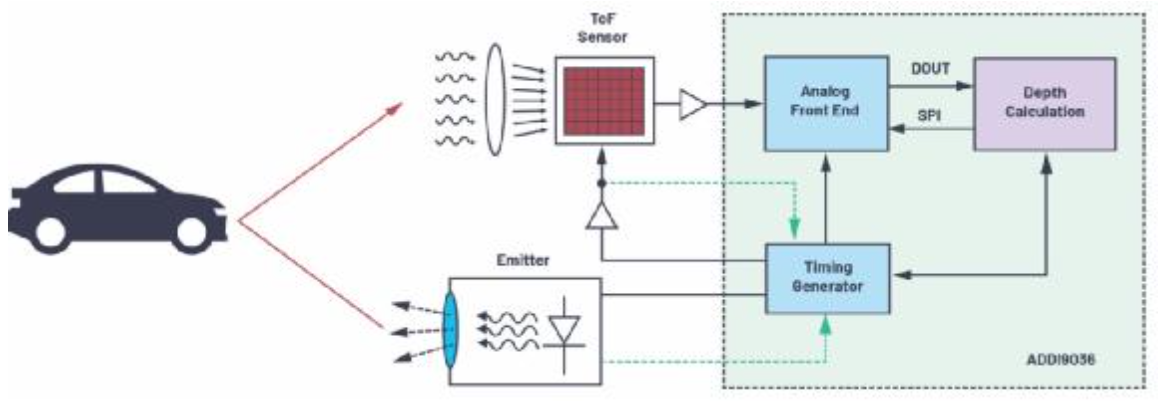
图2.ToF系统功能框图
测量结果也可能因雾或强烈的阳光等环境因素而失真。环境光抑制有助于解决强烈的阳光导致的失真问题。
ADI等半导体制造商提供完整的3D ToF系统,以支持快速实现3D ToF解决方案。他们将数据处理、激光驱动、电源管理和软件/固件集成到一个电子控制单元中。其他组件包括****调频光信号的****和记录反射信号的检波器。框图如图2所示。
具有集成深度计算功能的模拟前端(AFE)等组件对于构建此类系统将会大有帮助。而ADDI9036就提供这一功能。它是一个完整的CCD ToF信号处理器,具有集成激光二极管驱动器、12位ADC,以及为CCD和激光器生成时序的高精度时钟发生器。ADDI9036负责处理来自VGA CCD传感器的原始图像数据以生成深度/像素数据。
ADI还与设计合作伙伴合作,可以共同提供成品模块和开发平台。这些评估系统可用于开发特定的客户算法。成品模块和平台有助于加速开发,这在工业和汽车工程等时间紧迫的业务领域尤为重要。
参考资料
利用ADI飞行时间技术实现3D成像。ADI公司,2020年。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

