
雷达传感器的演进:ADAS / AV 系统的关键零部件
构建安全稳健的自动驾驶(AD)系统是一项复杂的任务。汽车制造商必须要克服眼前的困难,才能实现自动 驾驶的未来。 自动驾驶汽车(AV)上有数百个传感器,所有这些传感器都需要在车内相互配合工作以及与其他智能车辆配 合工作。实现自动驾驶功能的软件算法最终需要整合这些传感器收集的所有信息,从而确保车辆做出相应的 响应。
这些算法需要在涵盖不同驾驶场景的几百万个复杂情况下进行测试。汽车制造商需要能够信心十足地推出先进驾驶辅助系统(ADAS)和 AV 功能。 实现更高等级的车辆自主需要在技术上实现许多创新和进步。通过持续投入研发雷达、激光雷达和摄像头等传感器技术,将提高环境扫描能力。每种传感器都有其优缺点,它们需要相辅相成,才能确保目标探测过程有一定冗余。
雷达传感器测试的复杂性
要整合和传输大量高分辨率传感器数据(包括车联网通信输入)离不开强大的软件算法。机器学习是训练自 我改进算法的成熟方法。汽车原始设备制造商(OEM)使用这些算法来提升复杂交通情况下的决策能力。 在实验室里使用尽量逼真的激励以可重复、可控的方式来验证这些算法对于确保它们的准确度和安全部署有 着至关重要的意义。
汽车设计和测试工程师可以识别测试场景,将它们从 3D 仿真环境转化为输入到雷达模 块中的真实雷达信号,然后再实施路测。
自动驾驶的关键步骤包括构建和更新车辆感知的准确 3D 路况地图,然后将其解释给电子控制单元。尽管雷达技术已经不再是新鲜事物,但创新的雷达传感器前端仍在不断发展并变得越来越复杂。它们具有以下特性:
• 带宽从 76 至 77 GHz 提高到现在的 77 至 81 GHz
• 使用多个****和接收天线通过多路输入多路输出(MIMO)的多径传播来提高准确度
• 凭借第四维高度 4D 成像雷达提高分辨率
过去的 2D 和 3D 雷达无法感知高度维度,因为它们的能力有限且没有大型 MIMO。新一代雷达传感器包括 使用大型 MIMO 结构的宽天线孔径,它们解锁了第四个传感维度——高度。这些雷达传感器凭借更高分辨 率和增加到 4 GHz 的带宽进一步增强了感知能力。因此,汽车测试解决方案必须超越现有的传感技术并提 供更出色的功能,才能避免测量设备成为测试的瓶颈。
在实验室里使用尽量逼真的激励以可重复、可控的方式来验证这些算法对于确保它们的准确度和安全部署有着至关重要的意义。
支撑传感器的探测算法也需要应对越来越复杂的情况,因此在测试和验证方面提出了更严格的要求。 训练这些传感器需要的不只是点目标。在真实道路上,雷达传感器必须能够区分其他汽车、卡车、自行车和 行人。目标的识别和分类极其重要,因为它会影响车辆做出的反应和驾乘人员的安全。这也是当前实验室解 决方案的不足之处。机器人自动识别最多八个移动目标,每个目标只有一个点,这无法提供足够的细节来帮 助车辆学习如何对不同目标进行分类。
为了在实验室中模拟这些示例,汽车 OEM 需要将仿真软件的输出转换为真实信号,从而激励雷达模块。 它的工作原理是什么?
以下技术概念解释了汽车OEM 如何模拟实验室测试场景。
点云
点云描述的是代表对象或对象集合的点数据集。来自 x 轴、y 轴和 z 轴的坐标点将大量空间信息整合到 一个集合中。3D 激光扫描仪、激光雷达和雷达技术通常会产生点云和参考点云。本文中的点云来自 3D 场景仿真器。 点云为场景添加细节,确保您测试的算法能够区分两个靠得很近的目标。无论距离远近,传统的雷达目 标仿真器(RTS)只会返回一个反射值,而雷达场景仿真则会随着目标逐渐接近而返回越来越多的反射值。 这种类型的“动态分辨率”会根据距离的变化改变目标的反射点数。
为了显示点云,设置需要满足以下两个硬件方面的要求 :
• 光线追踪
• Rixel 墙
什么是 Rixel ?
Rixel 是体积很小,可以装入芯片大小单元中的射频收发信机。一个 Rixel 就好比电视屏幕上的 一个像素。 Rixel 矩阵是在一个电路板上放置八个 Rixel,然后将多个电路板彼此相邻堆叠起来,形成一个 高分辨率墙。 这就好比是一块高清屏幕,其中的像素能够显示不同颜色和亮度。与之类似,Rixel 可以“显示” 距离、速度和目标大小。
光线追踪
光线追踪技术可在测试期间提取传感器(例如雷达或摄像头)所需的信息(图 1)。
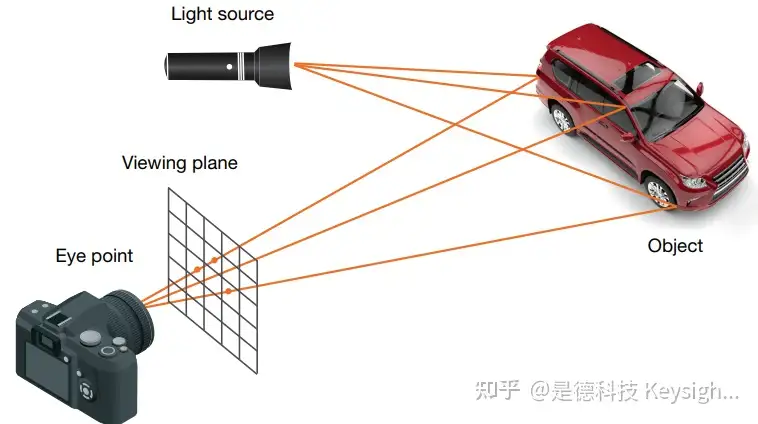
图 1. 光线追踪技术有助于为自动驾驶汽车中的传感器提取所需信息
什么是光线追踪
光线追踪的概念可以追溯到计算机图形学以及通过仿真光物理特性在 2D 屏幕上渲染数字 3D 目标 能力。将目标放置到激励-响应系统中使它们可见。
在这个示意图中,光源照亮目标,光线在多个方向上发生反射和散射。只有汇聚到用户眼睛的光线才会映射到观察平面上。屏幕的分辨率取决于观察平面的特性以及针对目标做出的或精细或粗糙的网格划分。目标渲染包括材料属性和其他相关信息,例如目标颜色和亮度。 虽然这种解释是专门针对可见光谱,但同样的原理也适用于基于 LOS 辐射的激励-响应渲染算法,例如雷达视觉。光源是雷达****机,相关材料属性包含雷达辐射反射率,空间速度转化成了多普勒效应。
Rixel 墙
为了将从光线追踪中提取的信息转换为雷达传感器能够探测到的信息,我们
• 将每辆车创建为一个目标
• 并为仿真中的每个目标分配方向和速度
RSE 测试阵列包含射频前端(或 Rixel)墙,它可以回显由被测系统(SUT)所需参数调制过的信号,用于 探测场景元素。一个 64 x 8 的 Rixel 阵列可以创建一个动态雷达环境,与依赖机械运动部件的系统相比, 它能够在更短时间内覆盖更多情况。此外,它具有更稳定、可预测、可重复和可靠的特点。
从设计原理上来说,这些小型化的 Rixel 无法由雷达传感器探测到,完全是由 3D 仿真软件激活,取代了 机械运动。阵列中的每个 Rixel 模拟一个目标的距离和回波强度。随着目标越来越接近,多重反射可以 使雷达更准确地探测和区分目标。
验证最近 1.5 米距离上的关键功能
许多测试例(包括 AEB、FCW、LDW 和 LKA)都需要模拟距离被测系统非常近的目标。例如,在接近路 口红灯时,每个方向上的车辆通常相距不超过 2 米。在运动场景中,自行车、摩托车、踏板车等两轮车 可能会突然驶入车道,或者行人可能会突然进入车道。图 2 中的绿色圆圈表示距离为 1.5 米,代表的是 测试重要安全特性时可以模拟的最小距离,也就是模拟自主车辆附近目标的能力。在实验室环境中重建 此类场景颇具挑战性。
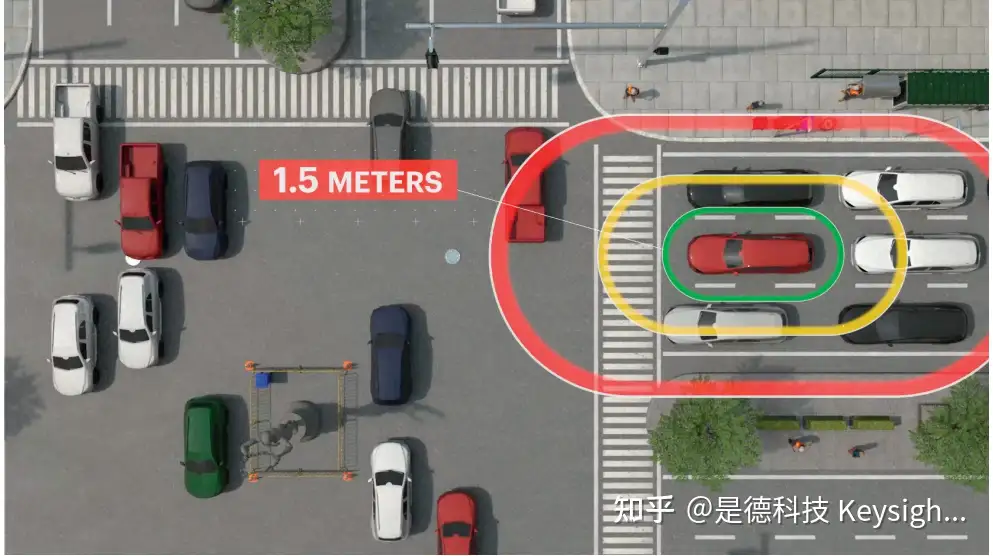
图 2. 绿色圆圈表示距离为 1.5 米,代表的是可以模拟的最小距离
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

