
实验名称:功率放大器驱动介电弹性体机器人
研究方向:仿生学
实验内容:通过高压施加在机器人驱动部分,观察机器人在一个电压周期内的运动过程
测试目的:利用介电弹性体驱动器制成可以奔跑的仿生软体机器人
测试设备:信号发生器,功率放大器AigtekATA-7030,介电弹性体机器人,高速运动相机。
实验过程:
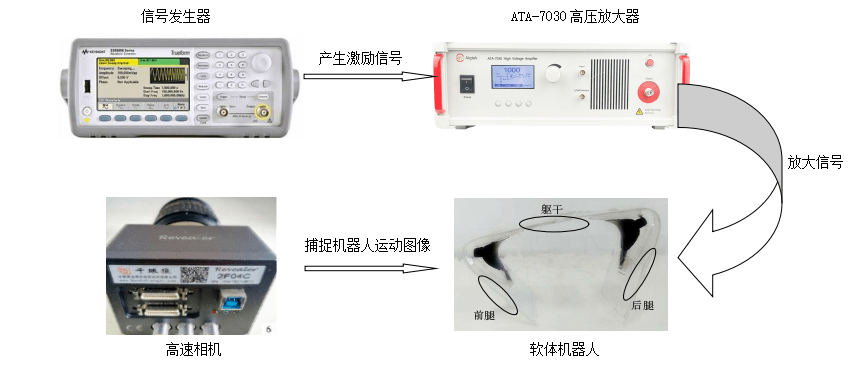
如上图所示为,其中包括一台信号发生器,用以产生频率为3HZ,波形为方波的激励信号;一台高压放大器ATA-7030,接受信号放大为5.5KV的电压,给机器人后退加电,使软体机器人运动,然后用高速相机捕捉机器人运动图像。
实验结果:
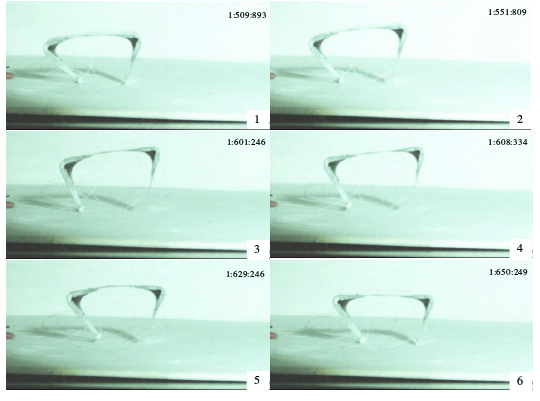
1:机器人初始通电状态,
2:机器人后脚抬起身体上扬,
3:机器人上扬角度达到最高状态,
4:机器人断电起跳,
5:机器人身体腾空,
6:机器人落地。
ATA-7030高压功率放大器参数指标:

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

