 与大部分机器人专家不一样,BEAM的创作者认为,真实的世界应该是模拟的,而不是数字的。BEAM机器人非常简单,正如很多人说的“做一个BEAM比理解它的原理还要简单” 与大部分机器人专家不一样,BEAM的创作者认为,真实的世界应该是模拟的,而不是数字的。BEAM机器人非常简单,正如很多人说的“做一个BEAM比理解它的原理还要简单”
BEAM是Biology Electronics Aesthetics Mechanics 的缩写
Photo Gallery - Walkers
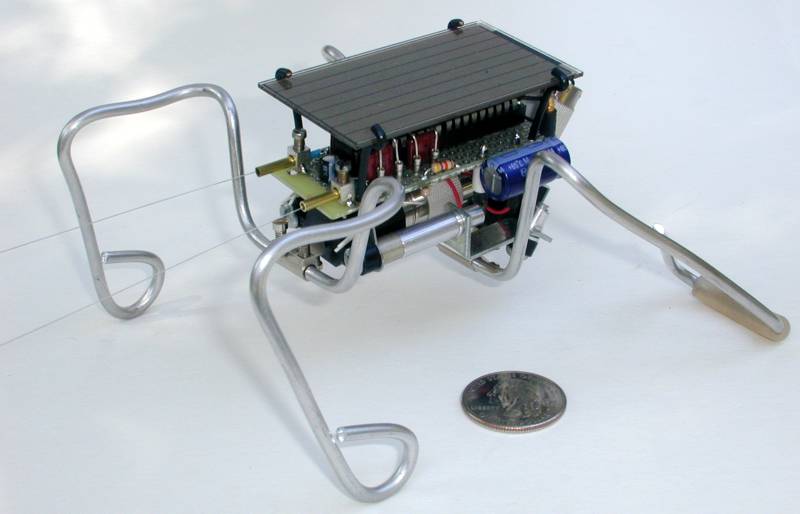
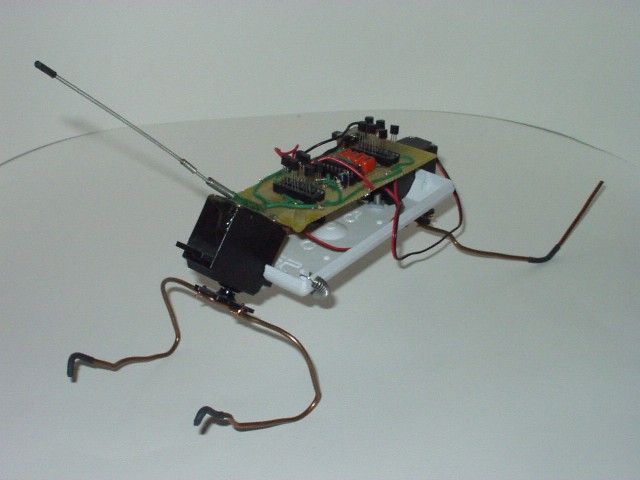
The Incredible Walking Machine
Creator: Jeff Steele
Description: This robot is a solar bicore walker that does not use a "solar engine". The circuit and motors are powered directly from the 30 or so milliamps (in full sun) provided by a 37mm x 66mm solar panel. On July 8, 2001 he took his first real world walks showing the ability to walk over rough terrain including through gravel, sand, dirt and some grass. WOW! With his feelers now installed and his new wide traction rear legs, I am very pleased with his overall performance.

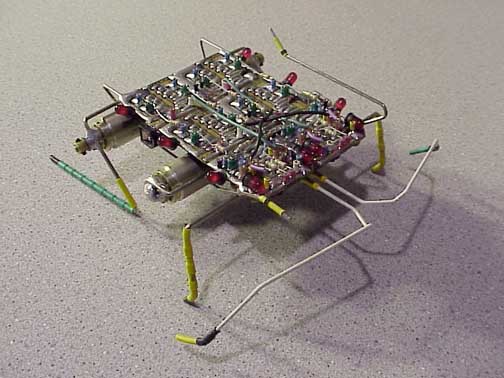
Shrimpy
Creator: Brian
Description: Having completed quite a few robots ranging from simple photovores, to four-motor walkers, I decided I needed a more ambitious project. Few people had built five-motor walkers, and Chiu had published his priliminary five-motor work, so I decided to experiment with one myself.
Walker
Creator: Brian
Description: After building a few photovores I decided to do something a little different. I already had a breadboarded Microcore circuit flashing in my window sill so I figured that I could build a whole walker. I started by designing and building a freeformed Microcore. This was quite simple and only took about 45 min. I then added two stacked '245s to drive my servos. This didn't work and so I left the project for a while. I then received my BG Micro catalog and and finally found out what everyone meant with the "lens motors". For a pair at $8 I decided to get two packages. When they arrived I decided to build the mechanics of my 2 motor walker. I replaced the servos with these new motors because they were so much smaller and more efficient. I connected the motors together with a paper clip and solder. Next, I made legs out of a coat hanger and made connectors (to mount the legs to the motors) based on Chiu's out of screws and some brass rectangular material I had. Original picture (before modification) from BEAM Online. I then rebuilt the '245s thinking they were the problem with the circuitry to discover that it was the Microcore that was no longer working. I then decided to try Bicore. I made a master-slave pair and had it working within 20 min.s of starting. I wired the Bicores so that I didn't need a driver, thus avoiding a problem I always run into.

Shock Walker
Creator: Mark W. Tilden
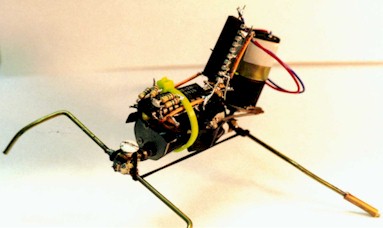
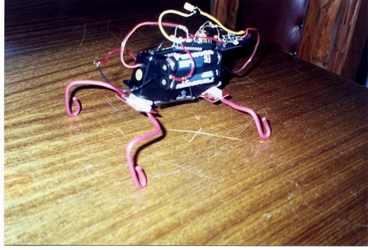
The Bug 1.3
Creator: Ian Bernstein
Description: The cool thing about The Bug is that is bounces more than it actually walks. I had to spread the legs out really far because he was bouncing over on his but. I'm going to add a tactile sensor later on. I only get this cool bouncing behavior for about ten minutes before the batteries start to run down, requiring frequent battery chargings.
UniBug 2.0
Creator: Mark W. Tilden
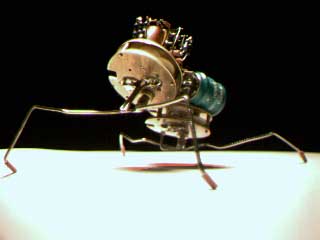
Zeus
Creator: Kyle Simmons
Description: Zeus was Kyle's first walker, built early in 2000. It is the Almost Complete Walker with H-brigdes as found at Beam-Online. The body was the back of a motion detector. Servos from Solarbotics.
FSTW
Creator: César Blum Silveira (Webmaster)
Description: FSTW is the abbreviation for First Walker. It was my first working walker. It is controlled by master-slave bicores and uses 2 Hobbico hobby servos. I used LMPD1s from Solarbotics to hold the legs.
|

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

