 
这个蛇形机器人由北京航空航天大学3位学生开发,这里给出详细的技术资料。
模块化可重构蛇形机器人技术报告
1.蛇形机器人研究背景
仿生学的范围很广,譬如雷达是对蝙蝠超声测距能力的模仿,而机翼使用的防震措施则借鉴了蜓蜻翅膀的结构。仿生机器人运动学是仿生学的一个很重要的发展。人类在智慧上超出动物很多,但在特定环境的适应上就要比动物差很多。虽然人发明了很多的技术弥补了这一不足,但明显可以看到,舰船的灵活性比不上鱼类,飞机的灵活性比不上鸟类甚至昆虫,车辆的地形适应性比不上四条腿的动物。仿生运动的研究可以弥补我们这方面的不足,对社会产生大的经济效益。蛇形机器人的研究可以满足一些行业的需求。蛇形机器人由于其天生的多关节、多自由度,多冗余自由度,可以有多种运动模式,可以满足在复杂环境中搜救、侦查、排除爆炸物等反恐任务;航空航天领域可用其作为行星表面探测器,轨道卫星的柔性手臂;工业上则可应用于多冗余度柔性机械手臂,管道机器人等方面。
区别于传统的“基于运动模型的运动控制策略”和“基于行为的运动控制策略”,以行为主义控制模型为基础,本文试图建立从模仿蛇类生物中枢神经系统及关节反射调节系统,实现一种“分布式底层运动控制――高层中枢决策”的控制模型。并且经由独立开发的蛇形机器人样机验证此一模型,在实验中取得了良好的效果,证明本文提出的控制模型没有原则上的错误以及不可克服的应用困难。
2.国内外研究情况分析
1)目前国内外对蛇形机器人研究综述
近几年来,特别是2000年以来,蛇形仿生机器人正在成为全世界新的研究热点。其理由有二:首先,仿生机器人学正在机器人领域占有越来越重要的位置,而由于其自身的典型性,蛇形机器人是仿生领域的热点研究方向;其次,运动机理特殊的蛇形机器人有广阔的应用情景,例如战场上的扫雷,爆破,空间站的柔性机械手臂,通过能力很强的行星地表探测器等;且其模块化结构和高冗余度非常适应于条件非常恶劣而又要求高可靠性的战场、外层空间等环境。国内也已经有单位开展这方面的研究,例如国防科大与中科院沈阳自动化所。
2)国内外研究概况
a) 美国宇航局(NASA)的SnakeBot
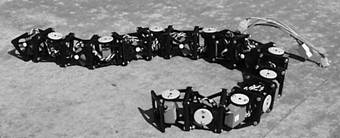
图1 NASA Snakebot I
NASA于1999年开始研究多关节的蛇形机器人,计划在其太空计划中用于行星地表探测以及空间站维护工作。其第一代蛇形机器人如图所示。它采用相邻正交的串联机构,由中央计算机集中控制。该机器人能完成蠕动前进,游动前进,翻越简单障碍物等功能。该蛇形机器人结构简单合理,对目前的蛇形机器人结构产生了很大的影响。
b) 德国Gavin.H S1-S5

图3 蛇形机器人 S5
德国人Gavin.H从约1997年开始从事蛇形机器人的研究工作,到目前为止共设计并制作了S1,S2,S3,S4,S5五代蛇形机器人,图3为S5。其研究已经达到相当高的水平,特点是:各个关节形状尺寸不同,高度模拟生物蛇;为二维结构,无法完成三维空间运动;依靠从动轮而不是摩擦运动,运动速度很高,主要运动方式为游动。
c) 德国GMD国家实验室的AiS

图4 GMD AiS
德国GMD国家实验室也开发出了基于模块式结构和CAN总线的蛇形机器人,其结构为三维关节,每关节有三个电机及六个力矩传感器,六个红外传感器,因此结构相当复杂,直径达20cm左右。其控制方式为上位机总线下位机。目前该机器人具有速度及位置闭环,能翻越简单障碍,具有一定的自主反应能力。
d) 国防科大RoboSnake
这是国内最早报道的蛇形机器人,最初为二维结构,依靠从动轮前进,长约1.5米,重约3Kg。目前发展为三维结构,但是依然保持从动轮。
e) 中科院沈阳自动化所蛇形机器人
同样采用正交串联结构,可以完成蠕动前进、游动前进、滚转等运动。
3) 研究的热点及主流方向
a) 运动机理
德国研究者Bernhard Klaassen和Karl L Paap认为研究基于蛇类生物的多节、多自由度机器人的关键是机器人的自主控制,以及一定结构下机器人体态变化过程中的有效控制问题。日本东京大学的 Luc JAMMES、Yasumasa KYODO 等人也有类似研究的报导。显然,这些研究仅仅是对一种运动原理的模拟,没有考虑环境因素,而且由于运动支承轮的存在,此种机器人系统很难适应障碍物众多、凸凹不平的自然环境。为此,日本Ibraki大学的学者进一步研究了蛇类生物的运动机理,利用串联杆系和行波运动,通过相应的结构及电机驱动,研制成仿蛇机器人系统样机,对其运动原理、结构特性、控制算法、数学模型进行了详细论证,试图开发其在上述环境中的应用。Ibraki大学系统工程系的Shugen MA 进一步研究了生物蛇行进过程中的肌肉特点,比较了已有的仿蛇机器人运动模型,最后从驱动力、运动效率的角度出发,得出了所谓仿蛇机器人的最佳运动波形、并将进一步开展实际机器人系统的机械构成、实现方面的研究和探讨。
由于生物蛇鳞片和关节的数目相当庞大,蛇类生物可以近似看作是一种“没有关节、柔性的”运动体。英国Heriot-Watt大学的G.Robinson和J.B.C.Davies基于生物蛇高度灵活性和机动性,进一步提出了连续机器人的设计思想,并通过不同形式和结构的液压驱动“人工筋”研制出不包含刚性联接和扭转关节的的机器蛇系统,该系统有较好的环境适应性,但也带来了体态控制困难、结构复杂和难以微型化的问题。这些问题只能在液压驱动技术得到发展后逐步解决。综上所述,基本可以认定,现阶段以及近未来,大多数蛇形机器人仍然是基于杆系结构模型。
b)控制理论及控制方式
在仿生机器人领域,目前大部分研究者专注于实现更高的运动效率,得到更加接近生物的运动,这无疑是仿生机器人的研究方向之一,但是很难指望在一种机械而固定的控制方式下能够得到真正具有生物特性的运动,这方面的研究所作的也只能是根据已知环境来尽可能模拟生物运动,尽可能提高运动效率。但是这样似乎很难超越“非确定性环境适应性”这一门槛,
目前已经有一部分研究者正在积极研究自适应运动控制理论,大部分研究者总的原则是试图建立一个普适的运动学模型和一个普适的决策理论,这个运动学模型应该是一个时变的数学模型,包括环境与本身的关系,能够描述时间、环境、自身状况对运动的影响,包含一组针对环境的传感与决策特征值(即决策控制层所需要的)。
作为一种典型的控制模式,基于CPG(中枢模式发生器)原理的机器人系统设计利用一个包含多个互抑制神经元的振荡器作为运动模式发生器,利用连接权重矩阵来描述多个振荡器的相位关系,调节运动模式发生器产生的节律信号,以模仿生物的步态产生原理为基础,利用CPG和几个振荡器得到各种步态。同时利用传感器构成对权重矩阵的影响,反映环境和自身的各种参数变化。这一思路比较新颖,且具有一定的普适性,应该是一种很有前途的探索方向。这种方式的缺点在于,其拓扑结构复杂程度随运动的复杂程度成平方关系增加,且达到更好的适应性需要大量的传感器反馈,如何把这些反馈合理地反映到运动权重矩阵中去仍然是个问题,这仍然需要对各种不可预见因素的大量模拟和实践,以得出合理的反馈处理方式。
考察国内外已知各仿生机器人研究者的控制方案,基本可以分为以下三种:
1)主控计算机中央控制,拓扑结构为星形,采用基于“命令宏”的开环/部分闭环控制。这种方案结构较简单,没有下位机,上位机直接控制电机以及处理传感器反馈,优点是所有关节相互独立,互不影响,但是这种控制律决定了其自适应能力差,容错性差,结构的改变将导致所有动作必须重新设计,中央计算机的瘫痪将造成系统的完全瘫痪。而且要求系统有一个高速、大容量的上位机。典型应用实例有NASA的SnakeBot。
2)利用CPG、行为主义控制模型、人工神经网络等分布式控制方案,典型应用如MIT的Brooks的"Genghis"六足机器人,“Vbug”机器人等。
2)既有主控计算机,也有局部控制器,结合以上两种控制方式的优点,这样对主控计算机的依赖大大减小使其的微型化成为可能,可以在很大程度上弥补上述两种控制方式各自的缺点,在需要自主运动和高度的鲁棒性时主要采用方式2,在执行确定任务时采用方式1和2的结合。
3.本作品的目的
传统的机器人控制策略有两种:基于固定模型的运动控制策略,以及基于行为的运动控制策略。
“基于固定模型的运动控制策略”的思想是以中央控制为主,预先建立具体的行为库,再通过传感器的反馈来改变各种具体的行为以获得某种程度的环境适应能力。从控制模型上来讲,这类策略都试图建立单一的FSM(finite state machine,有穷状态机)以模拟生物高度复杂、且原理上尚未完全探明的运动决策过程,这就决定了这类模型的实际性能。由于状态有限且预设规范有限,这类模型只可能在已知环境中行动,只可能具有相当有限的自适应能力。
“基于行为的运动控制策略”一般不包含主控计算机,系统的运动完全由各个关节分布的局部控制器的相互耦合来完成。低等生物常常是依靠各神经节的相互作用来完成运动,这是一种不经过思考的智能:基于这种“无思考智能”的控制系统具有实时性和自组织的特点,在高度非确定性的场合具有一定优势。
“基于运动模型的运动控制策略”的思想是以中央控制为主,预先建立具体的行为库,再通过传感器的反馈来改变各种具体的行为以获得某种程度的环境适应能力。某些这类策略还具有根据反馈修正原有运动运动模型的能力,比如采用遗传算法的机器人控制策略。这类策略的优点是设计较为简单,从控制模型上来讲,这类策略都试图建立单一的FSM(finite state machine,有穷状态机)以模拟生物高度复杂、且原理上尚未完全探明的运动决策过程,这就决定了这类模型的实际性能。由于状态有限且预设规范有限,这类模型只可能在已知环境中行动,只可能具有相当有限的自适应能力。
“基于行为的运动控制策略”一般不包含主控计算机,系统的运动完全由各个关节分布的局部控制器的相互耦合来完成。这是一种按照行为主义控制理论设计的控制系统。低等生物常常是依靠各神经节的相互作用来完成运动,而非大脑中央控制(事实上很多生物没有大脑或大脑很不发达)也可达到很高的自适应性。这可认为是一种不经过思考的智能:基于这种“无思考智能”的控制系统具有实时性和自组织的特点,在高度非确定性的场合和非结构化环境中具有比较良好的适应性。此种控制方式缺点是其状态机耦合网络设计复杂,且不适于完成一些高度确定的任务,而且可重复性较差。目前未见有行为主义控制策略应用于蛇形机器人的报导。
在深入研究国内外各蛇形机器人的基础上,我们作了不少关于蛇形机器人控制方式的探索。
既然传统的“基于运动模型的运动控制策略”以及“基于行为的运动控制策略”目前无法达到实用化,于是一个变通的研究方向就是:运动层面的仿生和决策层面的人控,以利用某些生物运动的优势(仿生特征),但又具有生物的智能(人工控制)。这应该是一个非常好的取长补短的策略,可以部分采用;但是这样实际上增加了机器人的操纵难度,因而限制了其应用领域。如能较好地综合以上方案则可以达到较好的综合效果。
所以,我们首先把行为主义控制模式应用于蛇形机器人的运动模式发生器,得到了多种全新的运动模式。然后归纳出了结合集中――分布式结构的蛇形机器人运动学模型。基于运动模式发生器产生的多种运动单元,利用蛇形机器人运动学模型完成中枢控制逻辑,实现了一种“分布式底层运动控制――高层中枢决策”的控制模型。以此为指导,我们设计了蛇形机器人SolidSnake并且完成了机器人样机,在国内外首先实现了高效率的自主上楼梯运动。
我们的实验已经证明本文提出的控制模型没有原则上的错误以及不可克服的应用困难。
在应用方面,蛇形机器人由于其自身的多关节、多运动方式,有很好的地形适应性,是执行废墟搜救、排除爆炸物等任务的良好平台,但是目前尚未见到蛇形机器人实用化的报导,SolidSnake已经可以在特定环境(自主与人控相结合,从某楼房楼外进入第二层的堆储杂物房间,找到并排除爆炸物)中完成模拟反恐任务,作了使蛇形机器人达到实用化的探索。
SolidSnake为杆式结构,模块化,可以在一定范围内随意增加或减少关节模块,机器人可以自动识别关节数量,可在二维结构和三维结构之间随时转换;控制方式采用主控计算机??总线??关节控制模块??电机/传感器的结构,应用行为主义控制理论在传统的“带反馈修正的命令宏”式控制方式中,二者相结合,以达到高度的鲁棒性。
4.创新点及主要指标
1) 创新点:
1) 成功地把行为主义控制理论用于产生蛇形机器人的运动单元,并且通过对蛇类生物的观察和分析,得出了适合杆系结构机器人的蛇类生物运动模型,此模型利用上述底层运动单元对整体运动节律进行集中控制。在此运动模型基础上制成了蛇形机器人SolidSnake,并且发现了行为主义模式的运动对于提高系统效率的重要影响。
2) 利用行为主义控制模式产生的动作,首创实现了蛇形机器人上楼梯的能力,并进行了侦察应用方面的尝试。
3) 创新地设计了可随时在二维结构和三维正交结构间转换的机体结构,且高度模块化,可在一定范围内随时增加、减少关节模块。
主要技术指标:
|
项目
|
全长
|
直径
|
净重
|
最大速度
|
续航时间
|
平均功耗
|
|
数据
|
1.2m
|
40mm
|
2.2kg
|
10-12m/min
|
1小时
|
25W
|
5.技术特点及运动算法
1) 基于行为的运动模式发生器
按照行为主义理论,低等生物没有存储、规划、控制全身各部分运动的中心控制系统,是根据身体各部分的不同反应,将一些局部看来漫无目标的动作合成为有意义的生物行为,这种行为简单但有意义。这种“无思考智能”具有实时性和自组织的特点,在高度非确定性的场合和非结构化环境中具有比较良好的适应性。著名的应用了行为控制理论的机器人有MIT的Brooks教授带领一个小组研究的的"Genghis"六足机器人,“阿迪拉-I”机器人,以及美国Los Alamos国家实验室的Vbug系列机器人等。蛇形机器人SolidSnake的运动模式发生器即是根据这一理论设计的。
通过大量实际观察和对视频的分析,我们发现蛇类生物的运动行为有这样两个特点:
1) 蛇类生物的运动有很大一部分具有简单的重复传播性,即运动的本质是一个很简单的动作,但是该动作沿蛇体的传播却可以形成非常复杂而有效的行为;
2) 蛇对外界刺激的反馈常常表现为单一的反应,比如昂起头等。但是这种反应并非一成不变,它常常是一个单一的动作,但是带有时变的参数和由当前状态决定的参数。
这二者结合,构成了蛇大部分的行为。
SolidSnake的运动模式发生器按(1)式(见下文)中特征设计。为了实现运动的传递,我们采用了如下的信号传递机制:
首先,中枢控制器给出动作样本和执行关节,放到系统总线上;对应的关节收到动作指令后立即执行,并且把执行完毕标志反馈给中枢控制器;中枢控制器再命令顺序相邻的关节执行此动作,得到执行完毕标志,依此类推。
动作传递过程中一直没有离开中枢控制器,这是由RS-485的单主机特性决定的,RS-485网络中各从机不能直接互相通信,只能通过主机转发。事实上,在这个机制中,运动一旦发生就不再需要中枢控制器的干预。实际上的逻辑是,某个关节受到激励产生运动,并把此运动传递到相邻的关节,相邻的关节以一定时序完成类似运动(参数可能不同),再传给下一关节,依此类推,从而形成(1)式(见下文)的运动,这就是SolidSnake运动发生器的工作过程。
在实验中我们发现这样的运动虽然可以多样化而协调,但是缺乏自适应能力。原因有二:
一是没有考虑外部的反馈;
二是没有一个时变因素的反映(比如反复尝试某动作失败后更换新的行为);
因此运动模式发生器还应加入外部环境的因素,即传感器的反馈(SolidSnake使用的传感器为微动开关和各关节的角度传感器)。在运动传递的过程中,各关节在执行动作前,先根据本关节处的传感器情况计算运动参数,再执行动作。中枢控制器负责处理全局的传感器,并把根据决策逻辑得出的运动修正指令发给各关节,以完成对特定情况的集中控制。
加入描述时间影响的参数和外界信号的参数,在实验中我们得出SolidSnake运动模式发生器的数学描述。
2) 蛇形机器人的运动模式发生器数学描述 及 中枢控制器简述
如果把蛇体抽象为一杆数为N的杆系,可以把上述包含外部反馈参数、时间参数的运动模式发生器描述如下(设运动从零时刻开始):
K(N,t) = K(N-1,t-Δ(t)) + C1*Σ(C2*t*ω(t-1)) + C3*L(t-1) (1)
当前状态 上一个相位状态 外界信号修正值 前次动作修正值
其中:
1. K(N,t)为t时刻第N节的状态;(这里的状态包括位置、速度、加速度以及相应的电机转速等参量)
2. C1为权值,代表当前状态与以前运动结果的关联度,C1*Σ(C2*t*ω(t-1))综合描述了外界信号对蛇体动作的影响;
3. ω(t-1)为上一时刻蛇体接受到的外界信号的函数,此参数描述了蛇体的外界信号接口,并且补偿由于时间流逝造成的外界影响越来越大,以至于当前控制命令被忽略的问题(这个问题在试验的初期出现过,由于时间流逝造成C1*Σ(C2*t*ω(t-1))项越来越大,以至于主要控制指令项K(N-1,t-Δ(t))可忽略);
4. C2*t为权值与时间衰减系数之积,描述了时间流逝对蛇的记忆产生的影响,两个分立动作之间时间间隔越长,前者对后者的影响也就越小,C2通过试验确定;
5. C3为权值,通过试验确定一组值,再在符合给定条件的时候赋给相应的控制变量;L(t-1)项描述了蛇体上一时刻的状态对当前状态的影响。此参数非常重要,因为某些动作能否完成取决于上一时刻蛇体的状态,比如上一时刻蛇体处于翻倒的状态,则当前时刻“眼镜蛇式侧移”是无法完成的,这样就要求翻倒后L(t-1)能趋于某个极限,这样则K(N,t)->K(N,t-1),即蛇体不会动;不动的状态持续一定时间,当外界信号修正值C1*Σ(C2*t*ω(t-1))达到给定阈值且相应标志值为真时,L(t-1)恢复原值,蛇体自动执行翻身动作,恢复正常相位;
该运动模式发生器的自适应能力表现为:假设Solidsnake遇到未知的障碍无法逾越,它会表现为重复同一个运动模式;由于时间参数和外部信号参数的存在,时间参数和外部信号参数会影响并逐渐改变运动模式发生器所产生的运动。调整这种改变的方向,就可以使这种运动的改变朝适应环境的方向发展。
SolidSnake的关节也会按照协议向中枢控制器报告其局部传感器的结果,中枢控制器通过决策算法调整运动,并调整运动模式发生器的改变方向,以适应未知障碍。
例如,在地形为一个半径较大的球台表面的时候,由于无法预知地面特征,SolidSnake会首先按照平地的模式蠕动前进;但是由于蛇体中部关节的电机无法承受前后两端下坠的扭矩,无法完成运动要求,只能依照地形贴在地面;这样会造成各关节的预定位置与传感器所显示的实际位置存在差距。因为这个差距,反映关节角度信号的外部信号参数会逐渐累积,并在累计到一定程度后使本关节的蠕动运动调整到不再“憋劲”的位置。这样角度差不再出现,上述外部信号参数不再改变,地形适应过程结束。
中枢控制器在物理结构上为RS-485总线的主机,负责协调各个动作,向各关节传递用于控制行为的参数,存储基本动作(即传递的第一个动作),并产生开始运动的信号。在必要的时候,中枢控制器可以通过发送一个控制字,完全取得控制权,以完成特定目标。
蛇形机器人SolidSnake为杆系结构,利用各关节处的直流伺服电机来控制各杆件的相对运动,以构成要求的运动。蛇形机器人要求具有多种不同的运动方式,包括:蠕动前进/后退,爬楼梯,游动前进/后退,翻越障碍,横滚,横向游动。还有其他的辅助运动,包括抬起头部,翻倒后自动翻身,等等。
根据此公式及我们设计的运动要求,我们为SolidSnake的中枢控制器设计了包括蠕动一个关节、扭曲相邻关节、固定一个关节在某个相位、放松一个关节等基本动作(即K(N,t)),
通过(1)的简化模型:
K(N,t)=K(N-1,t-dt) (2)
中枢控制器把一个蠕动关节的动作放在SolidSnake的第一个关节后,运动模式发生器会产生一个完整、平滑、比较自然的蠕动前进的运动,该运动完全不考虑传感器因素及时间因素。如图5所示。
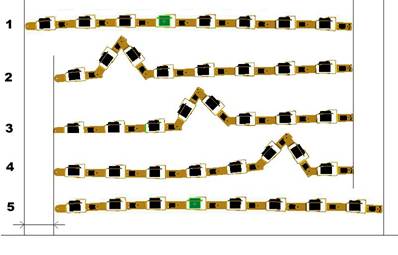
图5 蠕动前进示意图
通过(1)式,我们设计并实现了SolidSnake上楼梯的独特翻滚运动,如图6所示。此运动不仅包含K(N-1,t-dt)项,而且包括C1*Σ(C2*t*ω(t-1)) + C3*L(t-1) 项,其中C1*Σ(C2*t*ω(t-1)) 项包括位置参数和楼梯状况,由触动开关和手动辅助给出(例如楼梯开始和结束信号)。前次动作修正值由主控计算机保存。
利用此运动上楼梯的实验录像显示,这种利用行为主义控制模式产生的运动是合理和高效的。
我们一开始希望SolidSnake运动的自组织通过CPG、人工神经网络来实现。在研究过程中发现,这样会大大增加系统复杂度和试验的不可靠程度,因此我们采用了中枢控制器存储并触发动作,通过RS-485网络来传输各种触发标志和状态字,各关节处负责具体运动解析的MCU来分别存储和计算各权值,以实现“分布-集中”式的方案,试验证明,这样做是可行的。
图6 上楼梯运动示意图
3) 行为主义理论对运动中能量流的影响
SolidSnake使用的直流伺服电机额定电流约为300-350mA,按照蛇体共使用16个电机计算,其完成大部分动作时工作电流应该是约5A。但试验当中发现,除了整体滚动等少数情况外,大部分运动过程中实际电流都没有超过2.5A。考虑到电机为直流电机且共用一组电源线路,这样的现象应该是由于运动中相当一部分电机没有承受载荷,甚至于被其他电机拖动而向电源总线输出了电流。
联系上文给出的蛇类运动学模型,以蠕动前进为例,当第一个半波形成时(K(N,1)),系统消耗的电能转化为抬起部分蛇体的势能;在第二个相位,也就是K(N,2)时,第一个相位所储存的势能迅速转化为动能,然后依靠惯性和第二个波峰处电机提供的扭矩转变为第二个波峰处的势能。这样计算,每个波峰在蛇体上的一次传递过程中,只有第一个相位的波峰形成需要消耗较多的电能,形成下一个波峰时,大部分的势能都从前一个波峰传递到了下一个波峰,只需补充因摩擦、发热等造成的能量损失。这样的过程可以抽象为电能转化为势能,在一个“隧道”里传递,然后被抛出的过程。
可见,行为主义控制理论不仅可以用于控制信号的传递,在传递信号的同时能量也随之传递――与独立控制每个电机相比,这样的过程大大降低了能耗,提高了运动效率。以8节蛇体为例,从头到尾一个传递过程包含四个波峰,理论上只有一个波峰的形成需要消耗电能。易知能耗可以降低75%左右!
随后的实验结果表明:由于摩擦、抖动及其他尚未查明的原因,实际能耗的降低达不到理论值(实测值降低功耗40%――55%),但也能提高能量利用率,改善蛇形机器人运动效率较低的问题。
4) 模块化、可重构结构
SolidSnake在结构上一个最大的特点是其模块化/可重构特性。其关节机构简图如下图所示:
关节机构简图
这样的结构允许随时增加或者减少一定数量的关节。蛇体通过RS-485网络连接,我们设计的通讯协议会采用定时轮询的方式自动更新当前系统中总的关节数量,并据此改变运动算法。
同时,由于该结构是X-Y轴对称的,因此SolidSnake可以随时在X-Y正交串联结构(三维结构)和X/Y单方向串联结构(二维结构)之间转换,以适应不同的环境。三维结构更适用于复杂地形,上楼梯,越障等任务,二维结构可以在平坦地形达到更高的运动效率。按照三维结构装配的SolidSnake 装配图如下图所示。
三维结构装配图
6.结论
通过理论分析和实际场景试验,根据对生物蛇结构的分析及抽象,通过对蛇类生物运动模型的试验以及论证,本文提出了基于行为主义控制理论的一个运动模式发生器,并设计了中枢控制器,建立了“分布式底层运动控制――高层中枢决策”的控制逻辑,提出了蛇类仿生运动的一种高效率实现方法。不借助人工神经网络,这个蛇类生物运动学模型可以实现一定程度的自适应性和极为多样的动作序列(例如上楼梯的复杂运动过程)。将其应用于我们的模块化可重构蛇形机器人中,制造出了试验样机,通过实验验证了该模型的可行性和合理性。
目前蛇形机器人SolidSnake可以自主实现较高效率的蠕动前进(后退)、游动前进(后退)、侧移、抬头、自主避障等动作,可以上任意级普通楼梯,在一定程度上实现了蛇类运动的仿真,与国内外同类研究相对比,首先提出并实现了蛇形机器人上楼梯的方案,更接近于实用化。在结构上,我们独创的模块化可重构关节可在二维运动和三维运动间方便转换,蛇形机器人SolidSnake可随时增加或减少一定数量的关节,其控制系统可自适应关节数量的变化,调整动作。
7.未来的工作
本文提出的“分布式底层运动控制――高层中枢决策”的控制逻辑还不够完善,目前的实验基本集中在已知地表上的运动,实际控制逻辑也只对平坦地表和无拐点地表做了优化,在类似瓦砾地形、高度非结构化地形的适应性还比较差,进一步的研究主要集中于完善控制逻辑,提高对各种未知地形的适应能力,即提高通过能力和通过效率;
在实验的基础上,希望得到一个具有高度鲁棒性、普适的控制模型及其控制系统,为对蛇形机器人运动学的进一步研究打下基础。
为了验证我们的控制逻辑,需要做进一步的实验,在复杂地形上完成大量实验,积累实验数据和经验。例如在水中的游动实验、过管道实验等。
以上的工作完成后,我们将重点研究蛇形机器人的运动效率,在一个已经比较完善的平台上通过大量分析和实验来研究影响蛇形机器人运动效率的因素,得出具有理论支持的若干结论,依托这些成果,最终使蛇形机器人样机达到接近甚至超过同等大小蛇的运动速度,同时继承原有的高度适应能力和可靠性,早日实现蛇形机器人的实际应用。
8.参考文献
1. Serpentine Robots for Planetary Science.Serpentine Robotics at NASA AME Research Center
2. A robot that walks;Emergent Behaviors from a carefully evolved network. Rodney A. Brooks,MIT AI Memo 1091,Feb 1989
3. A behavior-based arm contoller.Jonathan H Connell, MIT AI Memo 1025,June 1988
4. How Snakes Walk,http://chabin.laurent.free.fr/snake.htm
5. Ibraki University.Analysis of Snake-Movement And Development of Snake-Like Robot.GMD’s Collection of Snake-Like Robots
6. Shigeo Hirose,The Biomechanisms of Snakes.http://mozu.mes.titech.ac.jp/research/snake
7. JPL lab,Light-weight and highly dexterious serpentine robot developed at JPL.
8. 钦俊德.动物的运动.北京:清华大学出版社,广州:暨南大学出版社,2000(5),第一版
9. 崔显世,颜国正,陈寅.一个微小型仿蛇机器人样机的研究.机器人,[J]1999,21(2) ,156-160
10. 刘华,颜国正,丁国清.仿蛇变体机器人运动机理研究.机器人,[J]2002,24(2),154-158
11. GMD, Robot-Snake with Flexible Real-Time Control. http://ais.gmd.de/BAR/index.htm
12. Snake-like Flexible Micro-robot,PROJET COPERNICUS CP94-1306
http://hp.agip.sciences.univ-metz.fr/~mihalach/welcome.html
附录:场景介绍
下面描述蛇形机器人在某个设定的环境中进行排除爆炸物任务的情景
某组织宣称,某建筑物二层藏有爆炸物,如不满足其条件则引爆爆炸物。限定时间为12小时。且如果有人企图拆除爆炸物则立即引爆。
此时人工拆除爆炸物十分危险,按我们要求研制的蛇形机器人则可以完成此任务。首先,某建筑物为中心半径100米内为危险区域,人员不能靠近。释放三条蛇形机器人,通过ARM嵌入式手持设备,无线遥控的方式控制,蛇形机器人头部装有微型摄像机,可以实时将前方情况传回,显示在手持终端上,并可以。按每秒0.4米的游动速度,长0.8――1米,直径0.04米的蛇形机器人通过旁边的草坪和花坛隐蔽游入该建筑(唯一被发现的可能是其运动噪声,但是可以通过制造现场噪声――如高音喇叭不断喊话,警笛不断鸣响――来掩盖)。到此共耗时10分钟。
蛇形机器人不能通过大门进入该建筑,因为恐怖分子可能会混入人群监视。进入方法有两种:一是大部分建筑物都有侧门,有些还有供猫等宠物出入的小口,蛇形机器人可以利用这些地方进入某建筑物大厅;二是通过人员将其放入窗户。蛇形机器人到达室内后立即紧贴墙壁行进,在遥控人员指挥下到达该建筑一层楼梯口处。到此共耗时10分钟。
` 遥控人员根据摄像内容判断楼梯级数,高度等参数,并向蛇形机器人发出上楼梯指令。此时自主运动方式启动,通过输入的楼梯参数开始爬楼梯。这个过程比较困难,设想耗时20分钟,且只有两条蛇到达第二层,到此共耗时40分钟。
到达第二层后立即进入各个房间搜索。两个情景假设:
一) 假设爆炸物藏在一个堆满杂物的废弃房间角落;
二) 假设爆炸物藏在一个房间文件柜中;
按照0.2-0.3m/s的运动速度(记入各种损耗),蛇形机器人SolidSnake仔细地检查完一个房间大约需要30分钟。该建筑二层大约有20个房间,假设检查到最后一个房间才发现爆炸物,加上移动时间,两条蛇形机器人共耗时6小时以内。
对第一种情况,蛇形机器人进入此房间后可能遇到堆放的大量桌子、椅子、文件柜等家具,以及扫帚、书籍等杂物。蛇形机器人通过桌子底下的约8cm高的空间游进房间,控制人员又发现前面是躺在地上的笤帚书籍等,不可能游过去;这时转入越障状态,蛇形机器人抬起头部搭在障碍物上,并不断蠕动,从而越过障碍物,到达房间角落,监控人员发现爆炸物,蛇形机器人在人控状态下打开头部的强酸喷射口(假设),销毁爆炸物,任务结束。
对第二种情况,蛇形机器人进入此房间后遇到较整齐的家具。按部就班依次搜索,依靠头部安装的炸药探测器(类似机场检验塑胶炸药的手持式仪器)对每件家具进行探索,则可发现爆炸物,任务结束。
到目前(2003年六月)为止,蛇形机器人SolidSnake已经基本完成第一个情景架设的功能演示,即可在较短时间内通过灌木丛和侧门,进入建筑物,在人辅助操控的情况下通过楼梯到达二层,进入某房间并对制定物品进行定位。预计后续试验将在年内完成。
附录:获奖情况
获北京航空航天大学2002年“冯如杯”学生课外科技作品竞赛 一等奖。
参加讨论: phpbb2/viewtopic.php?t=1425
|





 我要赚赏金打赏帖
我要赚赏金打赏帖 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

