
作者:内蒙古科技大学信息工程学院 杨玉志 焦成柱 罗红福
指导教师:陈波 刘丕亮
作品简介
开发背景:
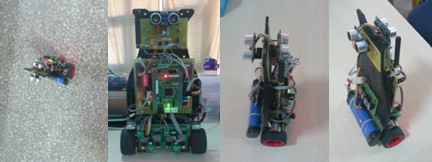
两轮自平衡车是一种新型的交通工具,它与电动自行车和摩托车车轮前后排列方式不同,而是采用两轮并排固定的方式,就像一种两轮平行的机器人一样。该系统是一种两轮左右平行布置的,像传统的倒立摆一样,本身是一个自然不稳定体,必须施加强有力的控制手段才能使之稳定。其体积小、结构简单、运动灵活,适于在狭小和危险的空间内工作,在民用和军事上有着广泛的应用前景。近些年来,随着人类对机器人的不断深入研究,移动机器人的应用领域变得更加广泛,然而随着工作所面临的环境和任务的越来越复杂化,对移动机器人的要求也越来越高,机器人常常面临着一些比较狭隘的、并且有很多大转角的工作环境,那么机器人如何在这种复杂的工作场合快捷高效的完成工作任务,成为人们颇为关心的工作话题。单轴双轮的自平衡车系统的概念就是在这种情况下提出来的。
结构说明:
两轮自平衡控制系统采用双轮驱动,利用两轮间的差速转弯,运动时只有两个动力轮着地,灵活方便,很适合在狭小大转角的空间中使用。整个车体结构包含三大模块:主控制器模块、传感器模块、电机驱动模块(具体参见设计说明)。
功能与使用说明:
在这个两轮自平衡控制系统上装有陀螺仪、加速度计姿态传感器,可以通过控制两个电机正反向运动来调节车体的姿态,使车体始终保持在平衡状态;还装有超声波测距传感器、无线发射与接收模块,可以实现距离测量、壁障、人机交互等功能。在这个系统上可以搭建机械装置,如机械手臂、机械爪等,可以灵活地在狭隘、危险、多转角的空间中完成物体的抓取、搬运等任务。
图片展示:
平台选型说明
嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心)
设计说明
各个功能模块的设计说明:
主控芯片模块:
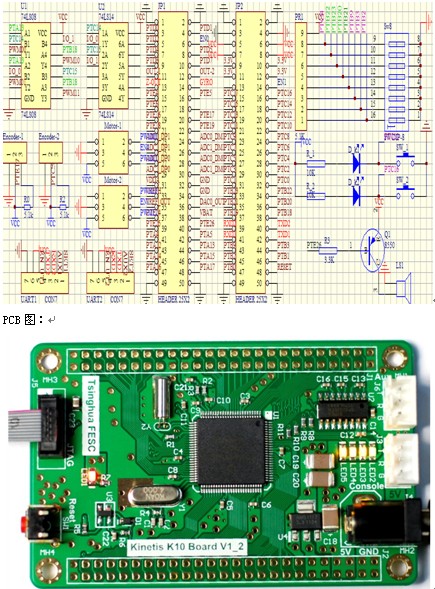
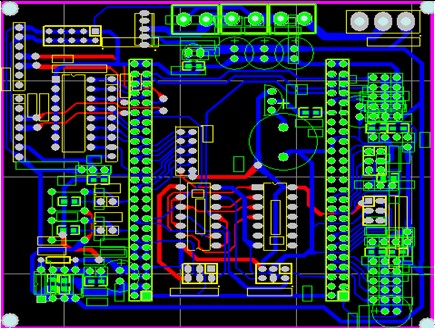
主控制器采用组委会提供的Freescale MK10DN512ZVLL10芯片,我们在此基础上扩展了一部分外围硬件电路,以利于整个系统的组装和调试。原理图与PCB图如下:
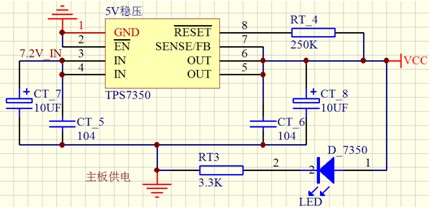
1、电源供电部分:
2、控制部分:
传感器模块:
1、陀螺仪、加速度计模块:
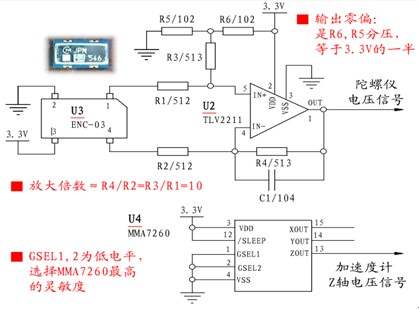
陀螺仪可以用来测量物体的旋转角速度,加速度传感器可以测量由地球引力作用或者物体运动所产生的加速度。在车模上安装陀螺仪,可以测量车模倾斜角速度,将角速度信号进行积分便可以得到车模的倾角。由于从陀螺仪角速度获得角度信息,需要经过积分运算。如果角速度信号存在微小的偏差和漂移,经过积分运算之后,变化形成积累误差。这个误差会随着时间延长逐步增加,最终导致电路饱和,无法形成正确的角度信号,这时可以通过加速度传感器获得的角度信息对此进行校正。通过对比积分所得到的角度与重力加速度所得到的角度,使用它们之间的偏差改变陀螺仪的输出,从而积分的角度逐步跟踪到加速度传感器所得到的角度。
2、超声波测距模块:
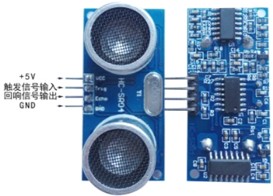
HC-SR04超声波测距模块可提供2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信号。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
无线通讯模块:
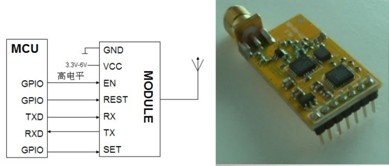
SI4432B1 433M无线数传模块,自带MCU,操作简单。可用于无线数据透传,可视距离最远达到1700M。
模块上自带的MCU已经实现了对SI4432的各种处理,用户只需通过通信接口(UART TTL)向模块发送相关指令,即可实现数据收发,完全无需关心SI4432的内部处理过程,操作非常简单。指令列表及其他操作方法请见用户手册。模块附送PC机测试软件,通过PC串口(需要转换成TTL电平)对模块进行各种操作。
透传模式:接收串口数据,通过RF发送出去;接收RF无线数据,通过串口发送出去,直观的讲也就是替代串口线。模块既可以收,可以发,自动切换,用户无需关心。
设置模式:用于设定RF通信速率、频点、地址、串口波特率等参数,设定后断电保存,不会丢失。
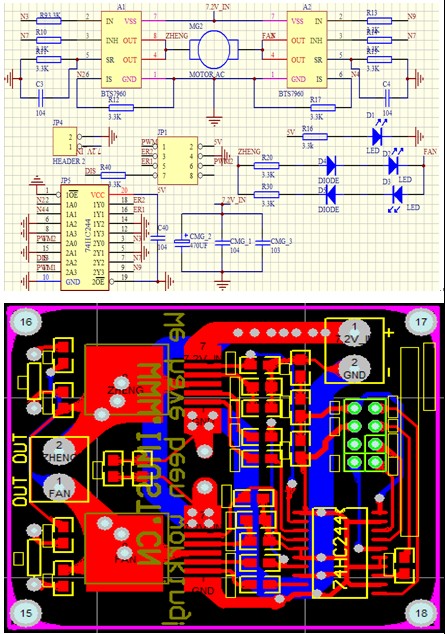
电机驱动模块:
BTN7971B是应用于电机驱动的大电流、半桥高集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。P沟道高边开关省去了电荷泵的需求, 因而减小了EMI(电磁干扰)。BTN7971B集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能。通态电阻典型值为16mΩ,驱动电流可达43A。我们采用两片BTN7971B构成一个全桥驱动。由于BTN7971B是大电流驱动芯片,故需要在单片机控制信号的输出和BTN7971B的IN端之间加入74LS244缓冲器起到隔离保护的作用。防止电路出现过流、短路等故障时,大电流流入单片机使单片机损坏。为了防止电机输出电流对于电源的冲击,在电路板的电源输入(7.2V)端口并联了一个470uF的电容。所以我们设计的电机驱动模块原理图和PCB图如图所示:
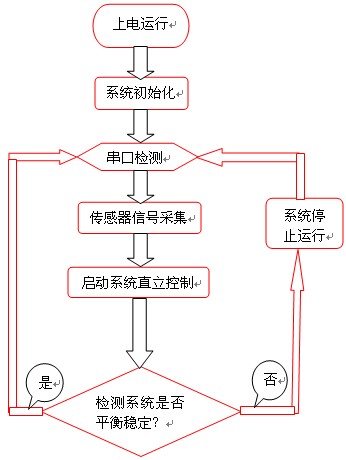
程序执行流程图:
作品特色
在这个两轮自平衡控制系统基础上可加载其他传感器(如红外等)和机械装置(如机械手臂、机械爪等),还可以采用先进的WIFI控制技术,控制器可嵌入Linux系统,以实现更精确、简单的人机交互功能,可以灵活地在狭隘、危险、多转角的空间中完成物体的抓取、搬运等人们无法完成的任务。
系统演示视频:http://v.eepw.com.cn/video/play/id/2918
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

