
介绍:
X2 并联机械手由 Delta 机器人变形简化而来,由两个移动副和若干转动副组成,两条机械手臂连杆呈 交叉型结构,两个移动副作为机械手的驱动。该机械手具有两个平动自由度,能实现一个平面内的二维移动,主要用于工业生产线上产品的快速抓取和放置工作。本文以该 X2 并联机械手为研究对象,首先建立 机构的运动学方程,进而利用了 NI 的虚拟原型技术,即在 LabVIEW 下结合 SolidWorks COSMOSMotion 模块对机械手进行了机电一体化仿真。机械手的控制系统采用工控机+运动控制模块模式,在软件层上调用 LabVIEW 视觉与运动模块函数,开发了该机械手的运动控制软件及界面,实现了包括单轴调整、点位运动、 轨迹轮廓运动和回零等功能。
应用方案:
本文针对 X2 并联机械手,首先建立其运动学方程,利用 LabVIEW 编程软件完成其参数化的运动学 仿真平台。进而在 LabVIEW 下结合 SolidWorks COSMOSMotion 模块对该机械手进行机电一体化仿真。 在此基础上,搭建了基于 PC+运动控制模块的控制系统硬件平台,利用 NI Motion Assistant 及 LabVIEW 的视觉与运动模块开发了该机械手的控制系统软件及其友好的操作界面。
1. 机构运动学分析
X2 并联机械手的结构简图如图 1 所示。根据其结构简图,我们可以进而得出动平台位置坐标关于两 个滑块 d 1 , d 2 的运动学方程。
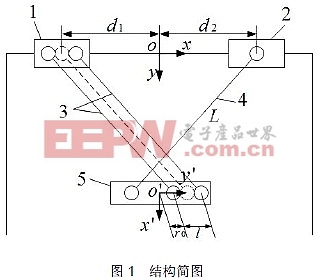
其中, d 1 , d 2 分别为滑块 1 和 2 在 xoy 坐标系中到 y 轴的距离,5 为机构动平台。
2. 机电一体化仿真
首先,在 LabVIEW 软件中建立机械手的数学模型,这里以实现一个矩形的抓取轨迹为例。同时,通过 LabVIEW SolidWorks Mechatronics 工具包调用 SolidWorks 机械手三维虚拟模型,以仿真生成的滑块 位置数据作为驱动,在 SolidWorks 里自动实现轮廓运动轨迹的仿真。调用和仿真界面如图 2 所示。

文章全文,回复可见:
——回复可见内容—— 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

