

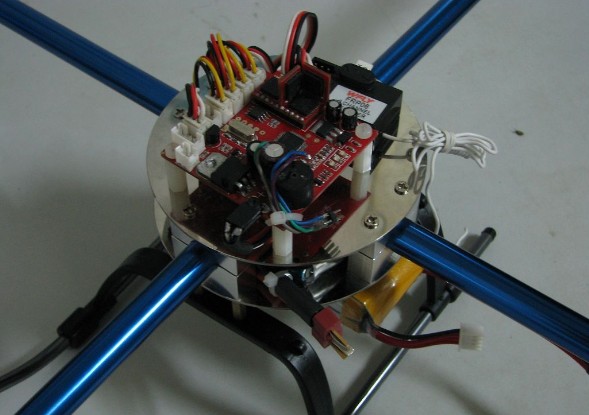
到这里为止,四轴飞行器的机架和遥控相关图片已贴完了,马马虎虎做了一点图片解说。机械结构对各位在座坛友达人来说,很容易看懂,我也就不多费口舌了 。
眼下四轴飞行器机架和外围相关设备改造已大功告成,接下来到四轴的灵魂部分---飞控+电调了。为什么电调也算是四轴的灵魂部分呢?因为四轴要用的电调,还是有所不同的。各看官稍安勿躁,且听我慢慢道来。
先说飞控的核心组成和大概原理,四轴飞行器相对于常规航模来说,最最复杂的就是电子部分了。之所以能飞行得很稳定,全拜电子控制部分的功劳。在常规固定翼飞机上,陀螺仪并非常用器件,在相对操控难度大点的直机上,如果不做自动稳定系统,也只是锁尾才用到陀螺仪。四轴飞行器与其不同的地方是必须配备陀螺仪,这是最基本要求,不然无法飞行,更谈不上飞稳了。不但要有,还得是3轴向(X、Y、Z)都得有,这是四轴飞行器的机械结构、动力组成特性决定的。在此基础上再辅以3轴加速度传感器,这6个自由度,就组成了飞行姿态稳定的基本部分,也是关键核心部分---惯性导航模块,简称IMU。飞行中的姿态感测全靠这个IMU了,可见它是整架模型的核心部件。
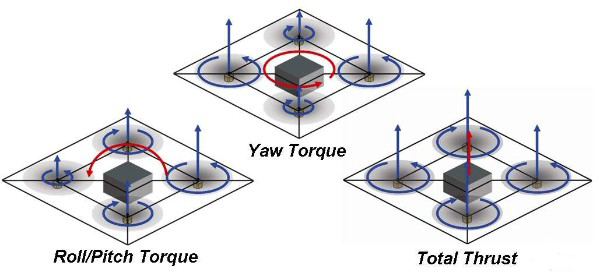
再说说电调,四轴飞行器有四个桨(纯属费话:em15: ),两两相对呈十字交叉结构,在桨的转向上分正转和反转,这样可抵消模型自身的旋转。每个桨的直径很小,通常是10寸左右。四个桨转动时的离心力是分散的。不象直机的桨,只有一个能产生集中的离心力形成陀螺性质的惯性离心力,保持机身不容易很快的侧翻掉。所以通常用到的舵机控制信号更新频率很低。四轴为了能够快速反应,以应对姿态变化引起的飘移,需要高反应速度的电调,常规PPM电调的更新速度只有50Hz左右,满足不了这种控制所需要的速度,且PPM电调MCU内置PID稳速控制,能对常规航模提供顺滑的转速变化特性,用在四轴上就不合适了,四轴需要的是快速反应的电机转速变化。用高速专用电调,IIC总线接口传送控制信号,可达到每秒几百上千次的电机转速变化,在四轴飞行时,姿态时刻能够保持稳定。即使受到外力突然冲击,依旧安然无恙。
我是个行动派+实干派,文字描述能力欠佳,读书时的那点写作文的“天份”,早就还给老师了。还是用图片说话吧,这样来得直接点。
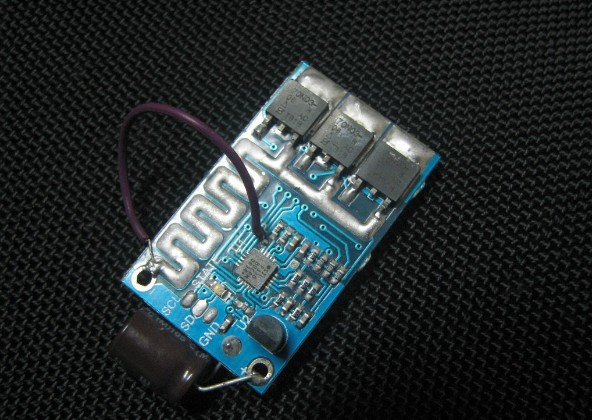
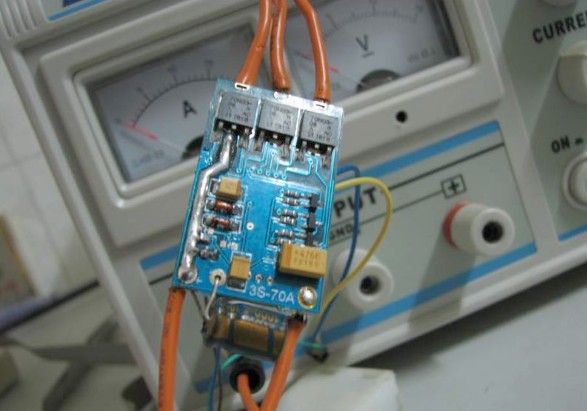
接下来是IIC高速电调,这个也是自已通过测试、不断完善才制作成功的。以前在另一个帖子有发过,一时找不到了。四轴飞行器的整机重量+3S锂聚电池通常在800g上下,悬停总电流最大不超过12A,分摊到每个电调上也就3~4A电流,考虑到可能出现的机身姿态大动态变化的情况,单个电调能提供25A的峰值电流已足够了。所以我做的电调只用了6个MOS管,测试过整机持续电流20A 工作20分钟,电调工作良好,这样的表现完全够四轴用了。再大的电流没条件测试了,我的直流电源只能提供到20A。
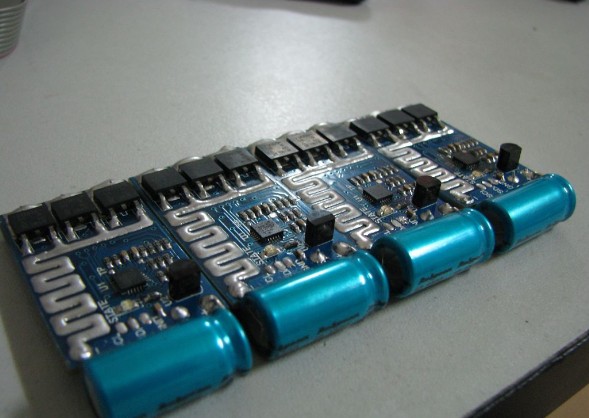
先贴几张实验时的电调板子图片。
* 电调测试板,新西达2212A电机,KV930

* 全部使用N-MOS,TO-220封装

* 测试用的15V20A直流电源




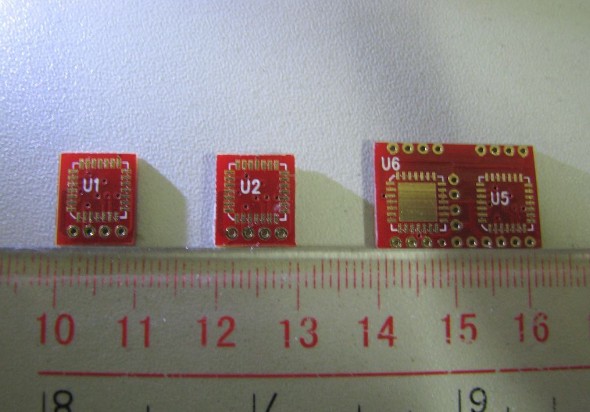
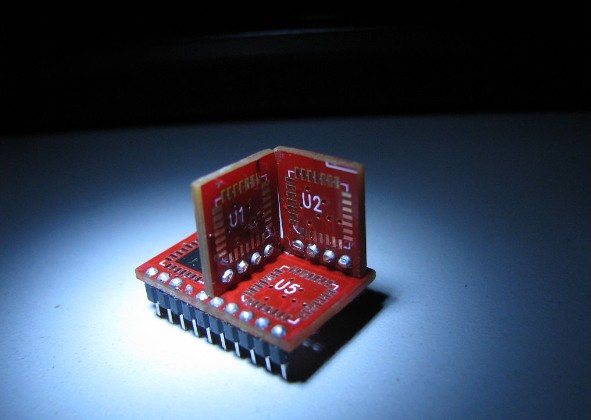
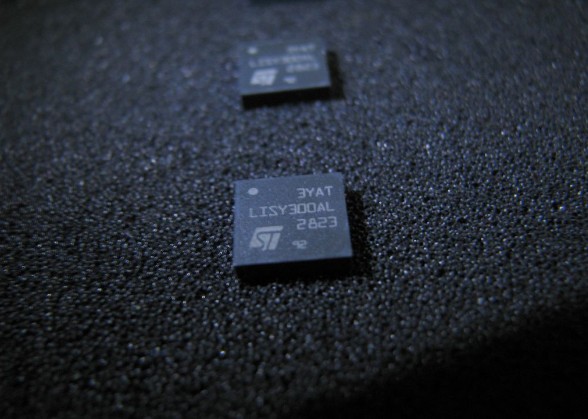
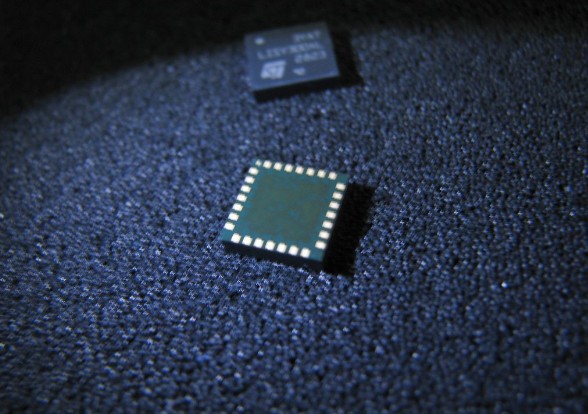
飞控板也已完工,该上上图片了。飞控板的核心就是IMU惯导模块,先贴IMU的吧。IMU由三轴陀螺仪和三轴加速度计协同组成,是整个飞控板乃至整架模型的核心,有了它才算具备飞行稳定的先天条件。为了飞行性能的提升和提高飞控实现的成功率,陀螺仪选用了MEMS工艺的LISY300AL,300度/秒感测量程,工作电压3V3,和飞控的CPU工作电压一致,用ADC采集陀螺仪的输出信号。加速度计是IIC接口的LIS3LV02DQ,每个感测轴都可设置轴滚动触发功能,用来感测飞行器姿态滚转,在飞行失控时可触发降落伞装置,使飞行器安全着陆。此功能做为备选项,暂放一边不管它,先从最简单的功能做起。限于个人能力,功能不急着搞得太多,以免目标太高对自已失去信心。
7.IMU模块PCB尺寸
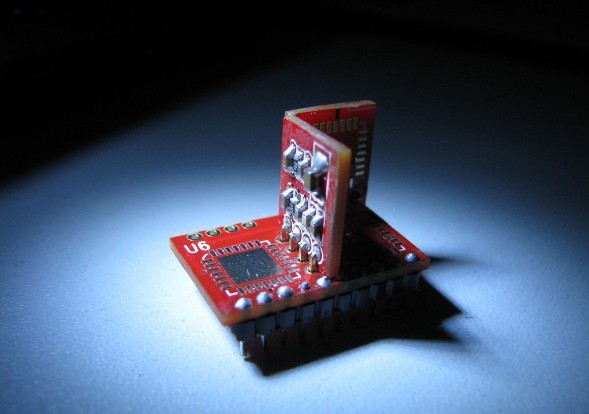
8.IMU模块组装好的样子
9.这边是加速计




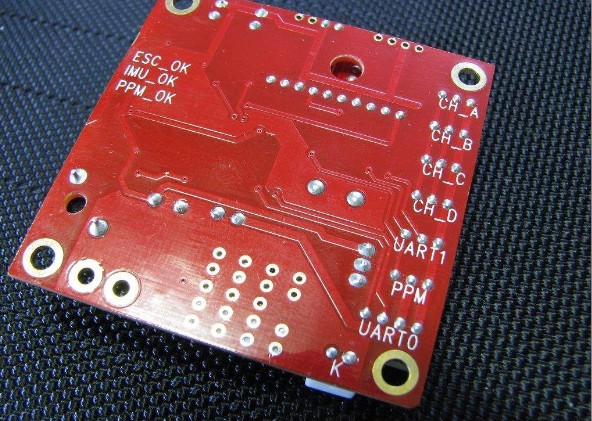
全部完工的飞控板。 板上接口共计有4路电调、1路PPM输入、2路UART通信串口,可接数传电台、GPS。另有一路可控的11V输出,用来接高亮LED发光条做夜航灯用。 蜂鸣器做操作必要的提示音用,电池低电时可通过发音提醒操作者需要着陆更换电池了。
16. 飞控板完成效果图


17. 飞控板背面。4路电调通信接口,2路UART,1路PPM。
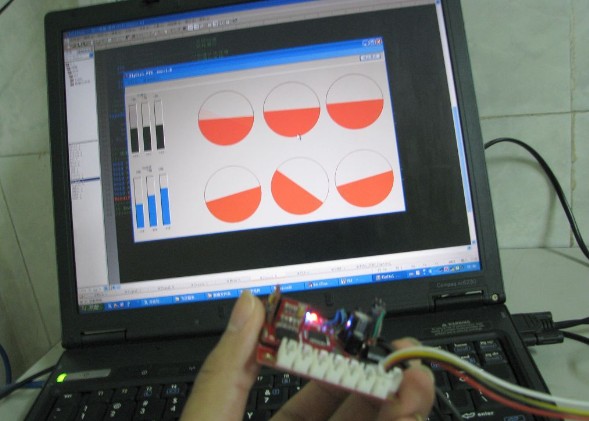
找朋友帮忙做的上位机,调试姿态使用。
18. 3轴陀螺+3轴加速计上位机
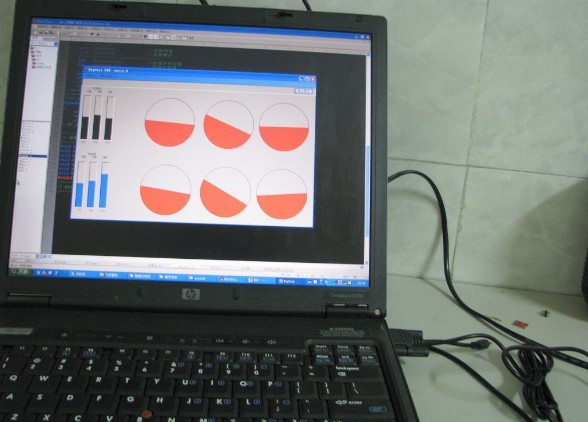
19. 飞控使用串口和上位机通信

20. 陀螺、加速计姿态
到此做四轴飞行器的必备之硬件条件、工具等前期工作已全部准备完毕。剩下的就是飞控软件的编写调试了,这注定是个痛苦+辛苦+漫长+繁琐+N次不规则循环的过程,希望千万别是死循环。当然,更期待的是成功一瞬间那种无可名状的激动心情。为了成功,加油了!也请各位在座的坛友,多多支持!多多鼓励!好让我感受到,偶不素一个人在战斗。



 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

