
作者:北京交通大学 陈荣 滕昊 马浩宇
指导教师:马庆龙 朱明强
作品简介
前言
第五届飞思卡尔杯智能汽车大赛首次加入了基于电磁传感器的寻线智能车,在地面铺设通有交变电流的引导线,在引导线周围激起交变的磁场,从而通过检测此磁场引导车辆行驶。使用电磁场作为引导智能车的优点,主要体现在磁场信号具有很好的环境适应性,不受光线、温度、湿度等环境因素的影响。由于电磁场是矢量场,具有方向行,对于不同的传感器和传感器的不同摆放方式,探测到的电磁场也是有所不同的。
这份技术报告中,我们通过对整体方案、电路、算法、调试、车辆参数的介绍,详尽地阐述了我们的思想和创意,具体表现在电路的创新设计,以及算法方面的想法,而对程序具体参数的调试也让我们付出了艰辛的劳动。
第一章 系统总体架构的设计
1.1 总体结构框图
系统是以检测电磁场信号为基础,通过单片机处理信号实现对车体控制,实现车体能够准确沿着预设路径寻迹。系统电路部分需要包括单片机控制单元、电机驱动电路、电磁传感器电路等部分,除此之外系统还需要一些外部设备,例如编码器测速、伺服器控制转向、直流电机驱动车体。综上所述,整个系统需要包括以下内容(如图1-1)。
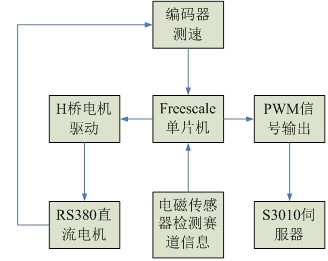
图1-1系统总体结构图
第二章 机械结构设计及制作
此次竞赛选用的智能车竞赛专用车模(G768 仿真车模)。智能车的控制采用的是前轮转向,后轮驱动方案。模型车基本尺寸参数如下表
表1
|
基本尺寸 |
尺寸 |
|
轴距 |
198mm |
|
前轮距 |
137mm |
|
后轮距 |
137mm |
|
车轮直径 |
52mm |
|
逐减传动比 |
18/76 |
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

