
作者:德州学院 丰雨 刘相根王凯杰
指导教师:曲培树张福安
作品简介
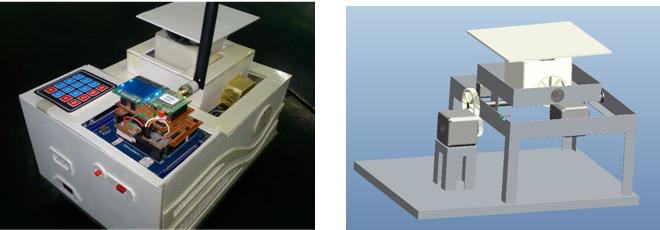
(1)应用领域和技术原理、用途:本作品机械结构分为底座和平台两部分,平台可以设置为水平或任意倾斜、旋转状态,当外部环境发生起伏、摇摆或旋转等干扰时,平台始终保持设定状态不变。系统通过加速计、陀螺仪等传感器获知平台的姿态,通过控制三个电机(轴向垂直)来控制平台的三个维度。当测知平台有偏离设定状态的趋势或角度时,单片机控制电机向相反的方向转动,从而使平台实时地保持在设定状态。平台可以作为各种设备的底座,它可以减小或消除震动环境对设备的影响。
(2)技术性能指标:
一、精度0.01°;二、动态响应时间为10ms。
(3)作品的创造性、先进性、可行性、实用性:
a、动态响应迅捷,平台自适应能力极强,动态响应速度为10ms,从而保证平台在震动环境下实时地稳定在设定状态。
b、静态性能稳定,在静态的环境下,控制系统可以实时的保证平台纹丝不动。
c、平台的理论角度偏差为0.01度,由于电机精度等因素的限制,实际偏差0.1度以内。
d、系统在三个相互垂直的自由度上控制平台的姿态,实现了全方位的灵活控制功能。
e、作品具有无线控制和远程控制功能。通过无线收发装置,电脑可通过上位机对平台的姿态进行实时的控制。通过互联网,远地的用户可以通过服务器间接控制平台的状态。
本作品高性能、多功能的特点使它可以应用到更为高端和更广泛的领域。
(4)作用意义:高精度智能平衡台在水平控制领域是位杰出的成员。不但具有较高的精度,而且可以实时地把平台稳定在设定状态,极大的方面了各种工作的进行,除了提高工作效率,更满足了高端的应用领域。
(5)推广应用前景、效益分析与市场预测:本作品可应用在军事,宇航,生产生活等领域。例如在平台上加上垂直激光,则可以作为空间尺度的校准;在军事上,则可以作为导弹等的发射底座,这样就可以实现移动状态下的炮弹发射,不会因为发射车的颠簸而影响炮弹的准确性,具有极高的战略意义。作品有极高的应用价值,而市场上并未出现相关的通用性产品,因此本作品具有很大的市场潜力。
(6)照片和机械设计图:
平台选型说明
IAP15F2K61S2单片机是STC生产的单时钟/机器周期(1T)的单片机,是高速/高可靠/低功耗/超强抗干扰的新一代8051单片机,采用STC第八代加密技术,加密性超强,指令代码完全兼容传统8051,但速度快8-12倍。内部集成高精度R/C时钟,±1%温飘,常温下温飘5‰, 5MHz~35MHz宽范围可设置,可彻底省掉外部昂贵的晶振。3路PWM/PCA,8路高速10位A/D转换(30万次/秒),针对电机控制,强干扰场合。
在Keil C开发环境中,选择 Intel 8052 编译,头文件包含即可
1. 增强型 8051CPU,1T,单时钟/机器周期,速度比普通8051快8-12倍
2. 工作电压:
IAP15F2K61S2工作电压:5.5V - 3.8V(5V 单片机)
IAP15F2K61S2工作电压:3.6V - 2.4V(3V 单片机)
3. 内部高可靠复位,8级可选复位门槛电压,彻底省掉外部复位电路
4 .内部高精度R/C时钟,±1 %温飘( -40oC~+85oC),常温下温飘5‰,内部时钟从5MHz~35MHz可选(5.5296MHz / 11.0592MHz / 22.1184MHz / 33.1776MHz)
5. 工作频率范围:5MHz ~ 35MHz,相当于普通8051的60MHz~420MHz
6. 低功耗设计:低速模式,空闲模式,掉电模式/停机模式.
7. 可将掉电模式/停机模式唤醒的资源有:INT0/P3.2, INT1/P3.3 (INT0/INT1上升沿下降沿中 断均可), INT2 /P3.6, INT3/P3.7, INT4/P3.0 ( INT2 / INT3 / INT4 仅可下降沿中断);CCP0/ CCP1/CCP2;RxD/RxD2;内部低功耗掉电唤醒专用定时器.
8. 增加了内部低功耗掉电唤醒专用定时器,也可将MCU从掉电模式/停机模式唤醒。
9. 8K/16K/20K/32K/40K/48K/52K/56K/60K字节片内Flash程序存储器,擦写次数10万次以上
10.片内大容量2048字节的SRAM
设计说明第1章 绪论
1.1系统简介
诸如在地形勘探领域的测量、建筑工地领域的水平校准、航空拍摄时摄像机等方面都需要保证在水平状态,目前,这些场合往往是使用水平仪来测量倾斜状态,并手动调整设备的平衡。为提高工作效率,我们研制了此项可以完全自主测量,并且可以自动将设备调节到水平状态的仪器,不仅如此,我们的作品在精度和相应速度上均达到先进的水平,并且具有极强的适应性,可以满足广泛领域的应用。
1.2 功能及原理
本作品机械结构分为底座和平台两大部分,把需要水平环境的设备安置在平台上,无论怎样晃动,设备始终保持在水平状态。本系统以IAP15F2K61S2为控制器,通过加速计、陀螺仪和磁场传感器感知平台的状态,然后通过控制三个电机实现控制平台的三个维度。其中x、y轴控制平台的水平状态,z轴控制平台的旋转,从而在保证平台水平的基础上控制平台不受环境旋转的影响而保持原方向不变。另外,通过上位机可以通过无线模块对水平仪进行离线操作,允许把平台调节到任意倾斜状态,而水平台仍然具有抗震动能力,始终维持在设定的倾斜状态。也可以通过上位机对水平仪进行远程控制。这使得本作品的应用领域大大拓广,可用在军事,宇航,生产等领域。
第2章 系统方案
为了提高作品性能,我们在机械结构设计、硬件配置、程序的滤波算法和控制算法上做了大量尝试,经过不断创新改进最终使作品定形如图1,
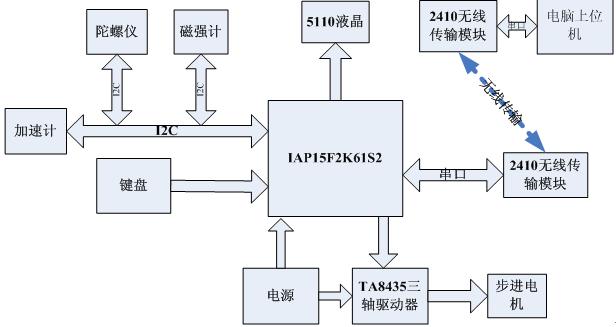
图1系统总体框
结构上,我们采用如图2的结构方案。这种结构可以使电机更为有效的控制水平台,这对平台的实时动态响应提供了结构基础;同时该结构还具有更大角度可控制幅度,这对作品在外界剧烈晃动的环境有了更强的适应性。
2.1 微处理器
AP15F2K61S2单片机是STC生产的单时钟/机器周期(1T)的单片机,是高速/高可靠/低功耗/超强抗干扰的新一代8051单片机,采用STC第八代加密技术,加密性超强,指令代码完全兼容传统8051,但速度快8-12倍。内部集成高精度R/C时钟,±1%温飘,常温下温飘5‰, 5MHz~35MHz宽范围可设置,可彻底省掉外部昂贵的晶振。3路PWM/PCA,8路高速10位A/D转换(30万次/秒),针对电机控制,强干扰场合。

图2 实物结构
在Keil C开发环境中,选择 Intel 8052 编译,头文件包含即可
1. 增强型 8051CPU,1T,单时钟/机器周期,速度比普通8051快8-12倍
2. 工作电压:
IAP15F2K61S2工作电压:5.5V - 3.8V(5V 单片机)
IAP15F2K61S2工作电压:3.6V - 2.4V(3V 单片机)
3. 内部高可靠复位,8级可选复位门槛电压,彻底省掉外部复位电路
4 .内部高精度R/C时钟,±1 %温飘( -40oC~+85oC),常温下温飘5‰,内部时钟从5MHz~35MHz可选(5.5296MHz / 11.0592MHz / 22.1184MHz / 33.1776MHz)
5. 工作频率范围:5MHz ~ 35MHz,相当于普通8051的60MHz~420MHz
6. 低功耗设计:低速模式,空闲模式,掉电模式/停机模式.
2.2 传感器
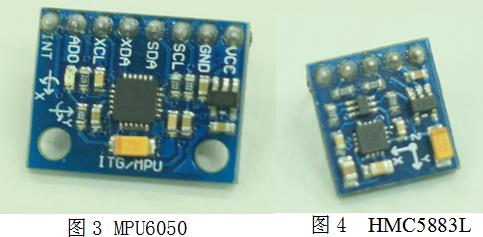
此系统使用MPU-6050和HM5883L作为传感器。
MPU-6050如图3,封装了陀螺仪和加速器,用于测量水平台的倾斜状态。
MPU-6050为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。MPU-6000整合了3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,并为应用开发提供架构化的API。
MPU-6050的角速度全格感测范围为±250、±500、±1000与±2000°/sec (dps),可准确追緃快速与慢速动作,并且,用户可程式控制的加速器全格感测范围为±2g、±4g±8g与±16g。产品传输可透过最高至400kHz的I2C或最高达20MHz的SPI。
MPU-6050可在不同电压下工作,VDD供电电压介为2.5V±5%、3.0V±5%或3.3V±5%,逻辑接口VVDIO供电为1.8V± 5%。MPU-6000的包装尺寸4x4x0.9mm(QFN),在业界是革命性的尺寸。其他的特征包含内建的温度感测器、包含在运作环境中仅有±1%变动的振荡器。
HMC5883L磁强计,用于测量平台的方向,为系统控制平台保持原方向提供数据。
HMC5883L 采用霍尼韦尔各向异性磁阻(AMR)技术,该技术的优点是其他磁
传感器技术所无法企及。这些各向异性传感器具有在轴向高灵敏度和线性高精度的特点.传感器带有的对于正交轴低敏感行的固相结构能用于测量地球磁场的方向和大小,其测量范围从毫高斯到 8 高斯(gauss)。 霍尼韦尔的磁传感器在低磁场传感器行业中是灵敏度最高和可靠性最好的传感器。
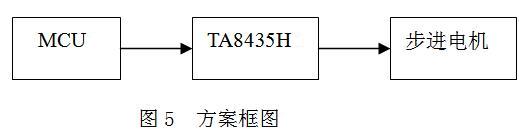
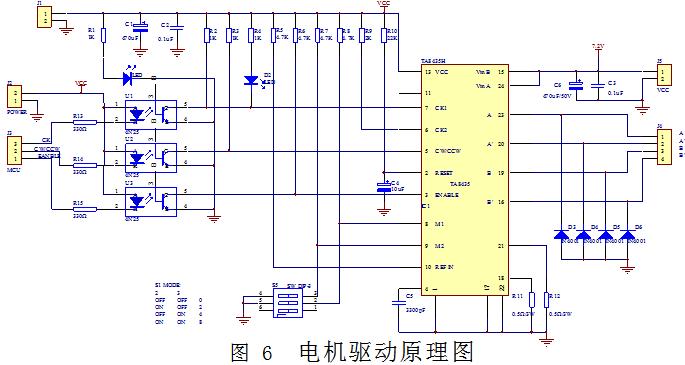
2.3 TA8435三轴驱动器及步进电机
本设计采用脉宽调制式斩波驱动方式,运用TA8435H步进电机专用芯片设计了一个两相步进电机细分驱动模块。模块中TA8435H芯片将来至MCU等控制器的单一脉冲信号进行脉冲分配,并在芯片内部提高驱动能力,进而驱动步进电机。该驱动模块具有以下特点:工作电压范围宽(10~40 v);输出电流大,可达1.5 A(平均)和2.5 A(峰值);具有整步、半步、1/4细分、1/8细分运行方式可供选择; 具有正/反转控制功能和复位和使能功能;编程简单,控制方便。
步进电机是一种专门用于速度和位置精确控制的特种电机,它旋转是以固定的角度(称为步距角)一步一步运行的,故称步进电机。步进电机安装有带永久磁性的转子,而定子至少具有两个绕线。当转子磁性与定子绕线保持一致时,将驱动第二个绕线。两个绕线交替开启和关闭,这将导致电机锁定在想要的步进位置。通过绕线的电流方向还可反向。
步进电机的特点:(1)一般步进电机的精度为步距角的3-5%,且不累积;(2)步进电机外表允许的最高温度取决于不同电机磁性材料的退磁点;(3)步进电机的力矩会随转速的升高而下降(U=E+L(di/dt)+I*R)。
由单片机产生脉冲,经TA8435H专用芯片进行脉冲分配和功率放大后,将脉冲信号输入步进电机进行驱动。设计方案如图5所示。
使用细分方式,能很好的解决步进电机在低频工作时,振动大、噪声大的问题。步进电机的细分控制,从本质上讲是通过对步进电机励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步距角的细分。跟用L298N比较:调试简单,最大1/8细分,低速运行震动噪音小;不但简化了电路而且该芯片价格更加便宜。
如图6,为驱动电路原理图。
本系统无线通信模块采用 ZM2410P0,如图7。
系统使用两个收发模块,一个直接连到电脑上,另一个安置在本作品中,实现电脑操控软件与平衡仪之间的通信任务。ZM2410系列产品为广州致远电子自主研发的2.4GHZ的Zigbee模块,内嵌串口透明传输(点多点和点对多点)通讯协议,支持空中升级固件或配置远程模块信息。将无线通讯产品的复杂的射频电路集成在一块小小的板子上,将无线通讯产品复杂的通讯协议内嵌到内置的8051单片机里,简单易用。

图7 ZM2410P0
如图8为本模块使用电路连接图。
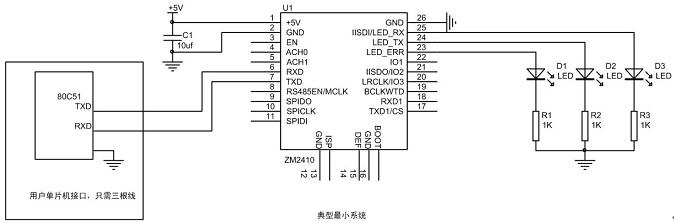
图8 ZM2410P0电路连接图
操控软件如图9,在电脑上运行此软件,则上位机通过2410无线模块和水平仪进行通信,通过旋转旋钮,可以任意改变平台的倾斜角度.。也可以通过数字输入的方式来调节平台的倾斜角度。同时,平衡仪任然具有自恢复性,即无论怎样晃动,平台始终保持在设定的状态。
而且,本软件具有联网功能,把一台电脑作为服务器,运行本软件。那么任何地方都可以通过互联网访问该服务器,并控制本软件,这就实现了远程控制功能。这一功能,将大大拓广本作品的应用领域。

图9 上位机软件截图
本软件使用Labview编写。
LabVIEW是一种程序开发环境,由美国国家仪器(NI)公司研制开发的,类似于C和BASIC开发环境,但是LabVIEW与其他计算机语言的显著区别是:其他计算机语言都是采用基于文本的语言产生代码,而LabVIEW使用的是图形化编辑语言G编写程序,产生的程序是框图的形式。
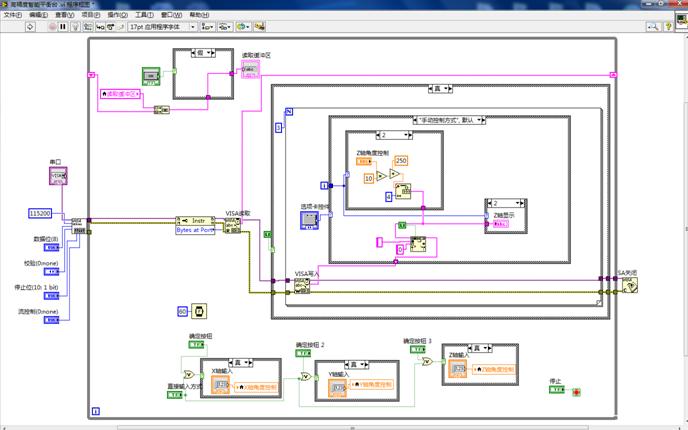
图10 上位机软件程序
第3章 功能与指标
3.1.1 功能一
开机后,平台会自动恢复到水平状态,当它的底座摇摆或转动时,它能始终保持水平且方向不变;
3.1.2 功能二
本软件的程序如图10 。
可以通过电脑输入x,y,z轴的数值,或者通过旋转相应旋钮,可以把平台设置成任意倾斜状态,当平台的底座发生晃动时,依然可以保持设定的初始状态不变。
3.2.1 精度
平台的理论角度偏差为0.01度,由于电机精度等因素,实际偏差0.1度左右。
3.2.2 响应速度
响应时间为10ms。
第4章 程序流程图
程序流程图如图11,本系统使用卡尔曼滤波算法,保证作品的角度测量精度,也对PID控制提供支持,使得本作品兼有高精度和实时动态响应的优点。
第5章 特色:
5.1 动态响应迅捷。
平台自适应能力极强,动态响应速度为10ms,从而保证平台在震动环境下实时地稳定在设定状态。
5.2 静态性能稳定。
在静态的环境下,控制系统可以实时的保证平台纹丝不动.
5.3 作品具有无线控制和远程控制功能。
通过无线收发装置,实现了对平台的离线操作。通过互联网,远地的用户可以通过这台电脑间接控制平台的状态。
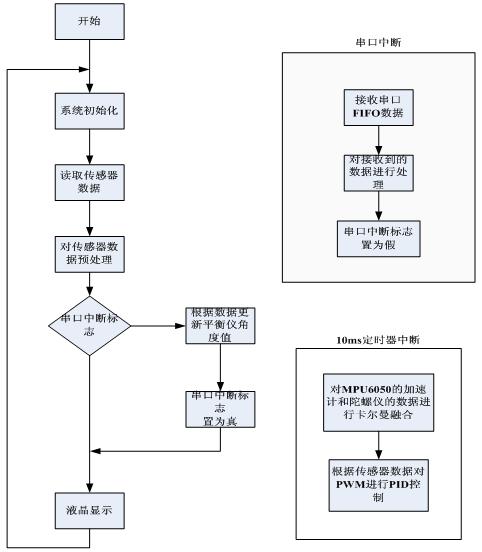
图11 程序流程图
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13365
 。
。 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

